Die vorliegende Übersetzung wurde maschinell erstellt. Im Falle eines Konflikts oder eines Widerspruchs zwischen dieser übersetzten Fassung und der englischen Fassung (einschließlich infolge von Verzögerungen bei der Übersetzung) ist die englische Fassung maßgeblich.
Kalibrieren Sie Ihr DeepRacer AWS-Fahrzeug
Um die beste Leistung zu erzielen, ist es wichtig, dass Sie einige physische Teile Ihres DeepRacer AWS-Fahrzeugs kalibrieren. Wenn Sie ein nicht kalibriertes Fahrzeug verwenden, kann dies zu zusätzlicher Unsicherheit beim Testen Ihres Modells führen. Wenn die Leistung des Fahrzeugs nicht optimal ist, sind Sie möglicherweise versucht, nur den Deep-Learning-Modellcode anzupassen. Bei einer mechanischen Ursache können Sie jedoch die Fahrzeugleistung auf diese Art nicht verbessern. Justieren Sie die Mechanik mittels Kalibrierung.
Um Ihr DeepRacer AWS-Fahrzeug zu kalibrieren, stellen Sie den Arbeitszyklusbereich
Die maximale Geschwindigkeit und der Lenkwinkel definieren den Umfang des Aktionsraums. Sie können die maximale Geschwindigkeit und den maximalen Lenkwinkel während des Trainings in der Simulation festlegen. Wenn Sie das trainierte Modell auf Ihrem DeepRacer AWS-Fahrzeug einsetzen, um auf einer realen Strecke zu fahren, müssen die Höchstgeschwindigkeit und der Lenkwinkel des Fahrzeugs so kalibriert werden, dass sie den im Simulationstraining verwendeten Werten entsprechen.
Um sicherzustellen, dass die realen Erfahrungen mit den simulierten Erfahrungen übereinstimmen, sollten Sie Ihr Fahrzeug so kalibrieren, dass die maximale Geschwindigkeit und der maximale Lenkwinkel zwischen Simulation und der realen Welt übereinstimmen. Im Allgemeinen gibt es zwei Möglichkeiten, diese Kalibrierung durchzuführen:
-
Definieren Sie den Aktionsraum im Training und kalibrieren Sie das physische Fahrzeug entsprechend den Einstellungen.
-
Messen Sie die tatsächliche Leistung Ihres Fahrzeugs und ändern Sie die Einstellungen des Aktionsraums in der Simulation.
Ein robustes Modell kann bestimmte Unterschiede zwischen der Simulation und der realen Welt ausgleichen. Sie sollten jedoch mit beiden Ansätzen und Iterationen experimentieren, um die besten Ergebnisse zu erzielen.
Schalten Sie das Computing-Modul ein, bevor Sie mit der Kalibrierung beginnen. Nachdem es gestartet ist und die Betriebs-LED dauerhaft blau leuchtet, schalten Sie die Fahrzeugbatterie ein. Nachdem Sie zwei kurze und einen langen Piepton gehört haben, können Sie mit der Kalibrierung fortfahren.
Um Ihr DeepRacer AWS-Fahrzeug so zu kalibrieren, dass es den Trainingseinstellungen entspricht:
-
Befolgen Sie diese Anweisungen, um auf Ihr Fahrzeug zuzugreifen und die Gerätesteuerkonsole zu öffnen.
-
Wählen Sie im Hauptmenü Calibration (Kalibrierung) aus.
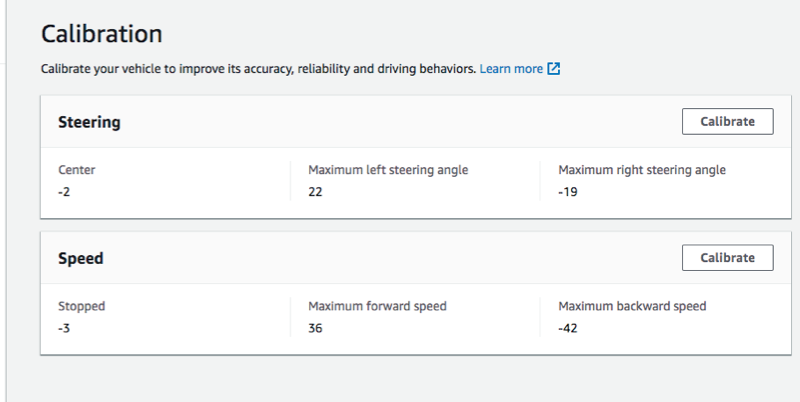
-
Wählen Sie auf der Seite Calibration (Kalibrierung) Calibrate (Kalibrieren) in Steering (Steuerung) aus und führen Sie dann die folgenden Schritte aus, um die maximalen Lenkwinkel des Fahrzeugs zu kalibrieren.
-
Stellen Sie das Fahrzeug auf den Boden oder eine andere harte Oberfläche, auf der Sie die Räder während der Lenkkalibrierung sehen können. Wählen Sie Next (Weiter).
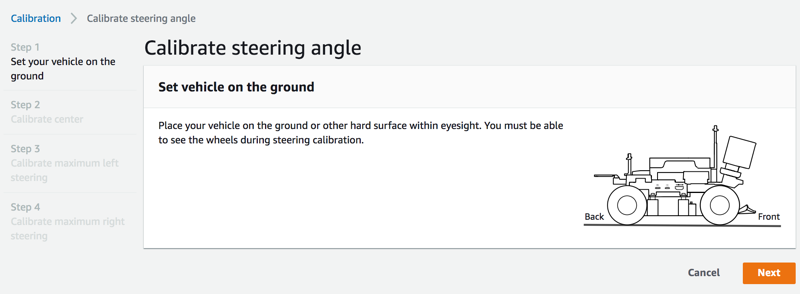
Das Lenken eines Fahrzeugs auf einer Strecke erfordert viel kleinere Lenkwinkel als bei Rädern in der Luft. Um die tatsächlichen Lenkwinkel der Räder zu messen, ist es daher wichtig, dass Sie das Fahrzeug auf der Fahrbahnoberfläche abstellen.
-
Bewegen Sie unter Center steering (Lenkmitte) den Regler schrittweise oder drücken Sie den linken oder rechten Pfeil, bis mindestens eines der Vorderräder am Hinterrad auf derselben Seite ausgerichtet ist. Wählen Sie Next (Weiter).
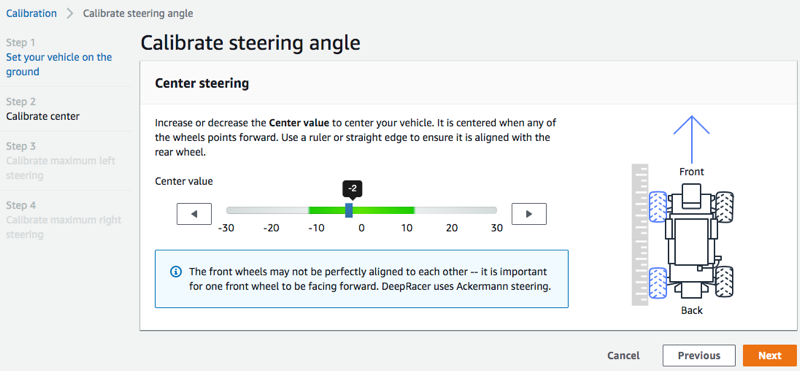
AWS DeepRacer verwendet die Ackermann-Frontlenkung
, um die Räder an der Innen- und Außenseite einer Kurve zu drehen. Das bedeutet, dass sich das linke und rechte Vorderrad im Allgemeinen in unterschiedlichen Winkeln drehen. In AWS DeepRacer erfolgt die Kalibrierung anhand des Mittelwerts. Daher müssen Sie die Räder auf der ausgewählten Seite so einstellen, dass sie in einer geraden Linie ausgerichtet sind. Anmerkung
Stellen Sie sicher, dass Sie Ihr DeepRacer AWS-Fahrzeug gut kalibrieren, damit die Mittellenkung so gerade wie möglich bleibt. Sie können dies testen, indem Sie das Fahrzeug von Hand schieben, um sicherzustellen, dass es gerade fährt.
-
Bewegen Sie unter Maximum left steering (Maximale linker Lenkwinkel) den Schieberegler allmählich nach links oder drücken Sie den linken Pfeil, bis sich die Vorderräder des Fahrzeugs nicht mehr weiter nach links drehen. Es gibt ein leises Geräusch. Wenn Sie ein lautes Geräusch hören, sind Sie zu weit. Die Position entspricht dem maximalen linken Lenkwinkel. Wenn Sie Ihren Lenkwinkel im simulierten Aktionsraum begrenzt haben, passen Sie hier den entsprechenden Wert an. Wählen Sie Next (Weiter).
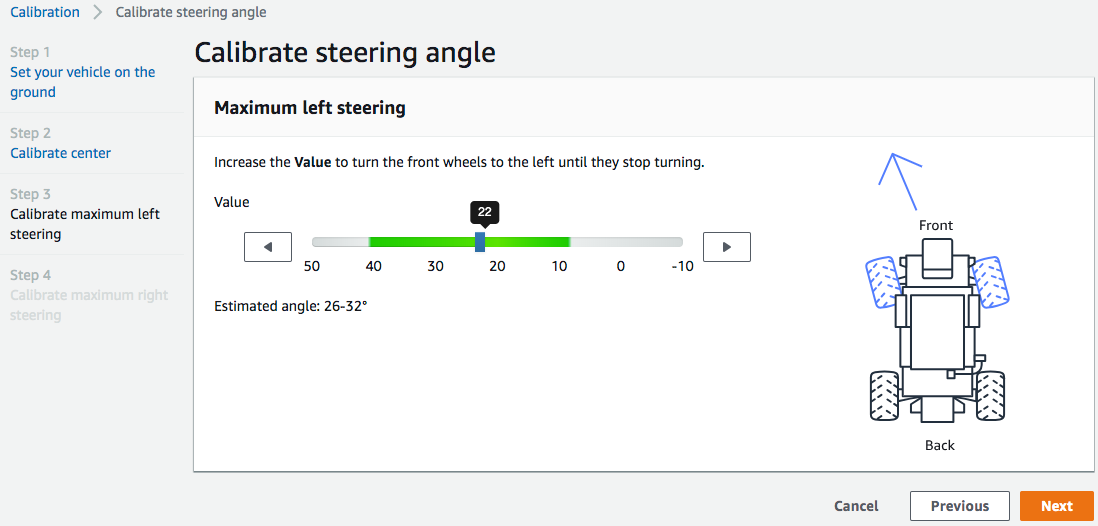
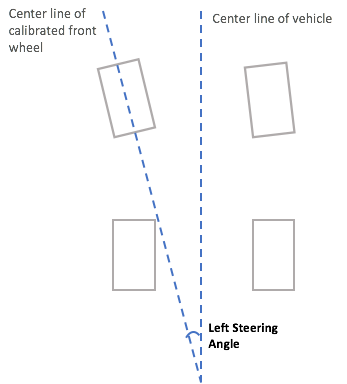
Um den tatsächlichen maximalen linken Lenkwinkel zu ermitteln, zeichnen Sie eine Mittellinie für das Fahrzeug. Markieren Sie die beiden Randpunkte des zur Kalibrierung ausgewählten Vorderrads und ziehen Sie die Mittellinie dieses Vorderrads, bis diese die Mittellinie des Fahrzeugs schneidet. Verwenden Sie einen Winkelmesser, um den Winkel zu messen. Mehr dazu in der folgenden Abbildung. Wenn Sie in Ihrem Training den tatsächlichen Winkel verwenden möchten, können Sie in Ihrem nächsten Trainingsjob denselben Wert für den Aktionsradius festlegen.
-
Abbildung: Bestimmen Sie bei der Kalibrierung für das Fahrzeug einen maximalen rechten Lenkwinkel. Es gibt ein leises Geräusch. Wenn Sie ein lautes Geräusch hören, sind Sie zu weit. Die Position entspricht dem maximalen rechten Lenkwinkel. Wenn Sie Ihren Lenkwinkel im simulierten Aktionsraum begrenzt haben, passen Sie hier den entsprechenden Wert an. Wählen Sie Done (Erledigt) aus.
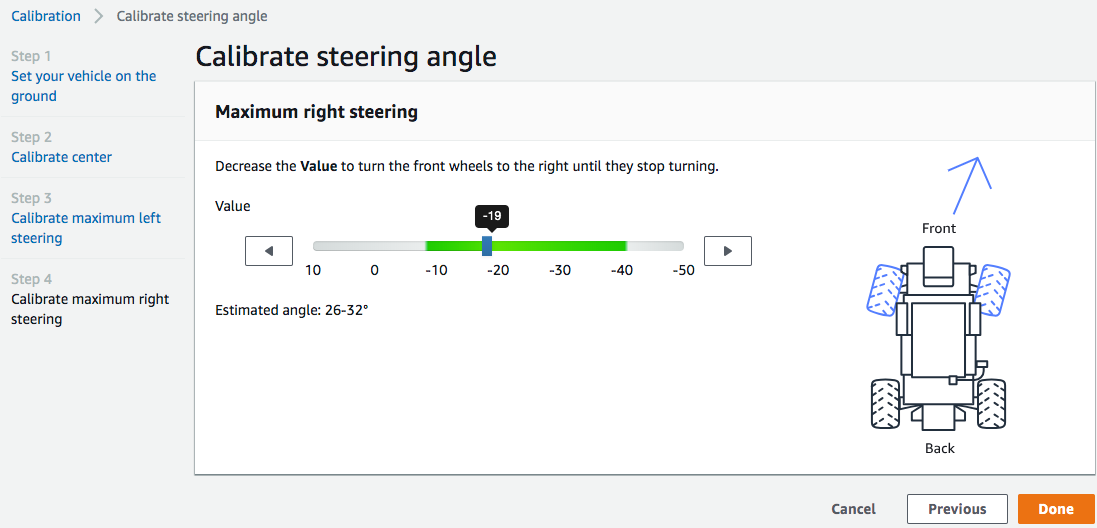
Um den tatsächlichen maximalen rechten Lenkwinkel zu bestimmen, folgen Sie den gleichen Schritten wie bei der Messung des maximalen linken Lenkwinkels.
Damit ist die Lenkungskalibrierung für Ihr DeepRacer AWS-Fahrzeug abgeschlossen.
-
-
Um die Höchstgeschwindigkeit des Fahrzeugs zu kalibrieren, wählen Sie Calibrate (Kalibrieren) in Speed (Geschwindigkeit) auf der Seite Calibration (Kalibrierung) und führen Sie dann die folgenden Schritte aus.
-
Heben Sie das Fahrzeug so an, dass sich die Räder frei drehen können. Wählen Sie in der Gerätesteuerkonsole Next (Weiter) aus.
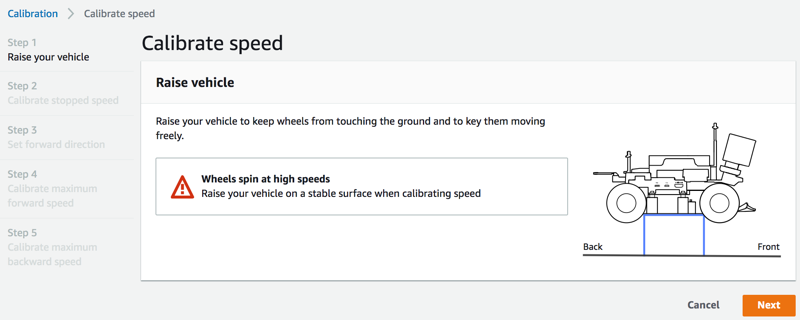
Anmerkung
Wenn die Geschwindigkeit des Fahrzeugs zu hoch eingestellt wurde, kann es während der Kalibrierung zu schnell fahren und Schäden an der Umgebung, dem Fahrzeug oder Personen in der Nähe verursachen. Sie sollten das Fahrzeug, wie hier beschrieben, anheben. Sie sollten es jedoch nicht in den Händen halten.
-
Um die Geschwindigkeit im Stillstand zu kalibrieren, drücken Sie den Pfeil nach links oder rechts, um in der Gerätesteuerungskonsole Stopped value (Gestoppter Wert) unter Stopped speed (Gestoppte Geschwindigkeit) zu ändern, bis sich die Räder nicht mehr drehen. Wählen Sie Next (Weiter).
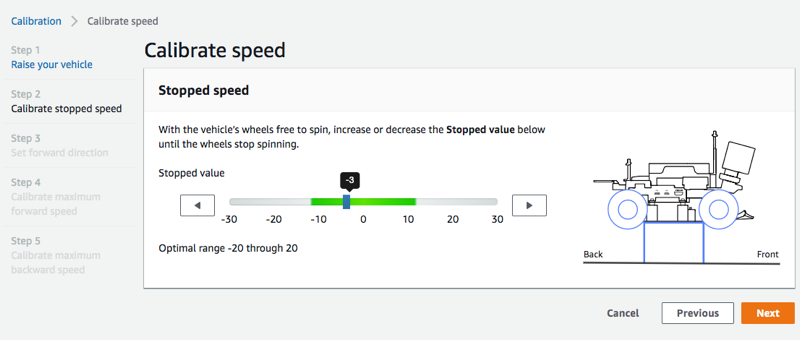
Anmerkung
Wenn Sie Sie Geräusche hören, während Sie den Stopped value (Gestoppten Wert) weiter nach links oder rechts verschieben, bewegen sich die Räder. Der ideale Nullpunkt liegt in der Mitte der beiden Werte. Wenn Sie beispielsweise bei 16 auf der linken Seite und bei -4 auf der rechten Seite ein Geräusch hören, ist der optimale Stoppwert 10.
-
Um die Vorwärtsrichtung des Fahrzeugs festzulegen, platzieren Sie das Fahrzeug wie auf der Seite und auf der Abbildung hier. Drücken Sie dann den Pfeil nach links oder rechts, damit sich die Räder drehen. Wenn sich die Räder im Uhrzeigersinn drehen, ist die Vorwärtsrichtung festgelegt. Wenn nicht, schalten Sie die Reverse direction (Richtungsumkehr) um. Wählen Sie Next (Weiter).
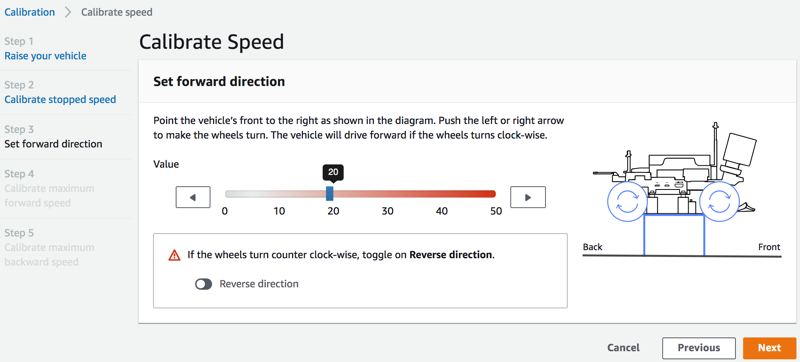
Anmerkung
Bei Fahrzeugen, die auf derAWS re:Invent 2018 vertrieben wurden, könnte die Vorwärtsrichtung in umgekehrter Richtung eingestellt werden. Achten Sie in diesem Fall darauf, dass Sie die Reverse direction (Richtungsumkehr) umschalten.
-
Um die maximale Vorwärtsgeschwindigkeit zu kalibrieren, bewegen Sie den Schieberegler unter Maximum forward speed (Maximale Vorwärtsgeschwindigkeit) vorsichtig nach links oder rechts, um den Maximum forward speed value (Wert für maximale Vorwärtsgeschwindigkeit) schrittweise auf einen so positiven Wert zu justieren, dass der Estimated speed (Geschätzte Geschwindigkeit)-Wert gleich oder ähnlich der in der Simulation angegebenen maximalen Geschwindigkeit ist. Wählen Sie Next (Weiter).
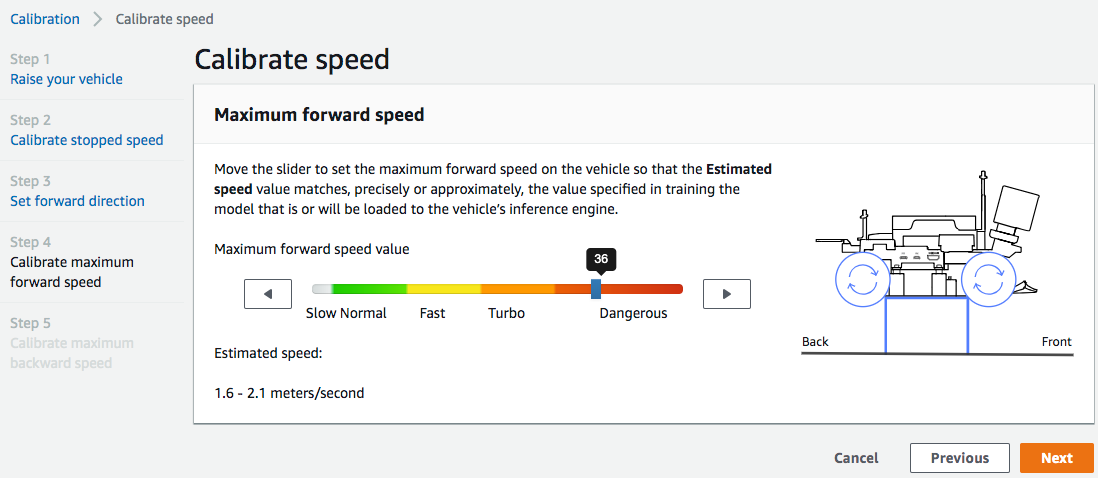
Anmerkung
Die tatsächliche Höchstgeschwindigkeit Ihres Fahrzeugs hängt von der Reibung der Fahrbahnoberfläche sowie dem Batteriezustand des Fahrzeugs ab. Für mehr Flexibilität können Sie die Drosselung des Fahrzeugs 20-30 Prozent über der für das Training in der Simulation festgelegten Höchstgeschwindigkeit festlegen. Generell sollten Sie den Wert für die Höchstgeschwindigkeit innerhalb des grünen Bereichs festlegen. Bei höheren Werten kann es vorkommen, dass Ihr Fahrzeug zu schnell fährt und ein erhöhtes Risiko für Beschädigungen besteht. Außerdem unterstützt der Aktionsraum für das Training keine Höchstgeschwindigkeit von mehr als 2 m/s.
-
Um die maximale Rückwärtsgeschwindigkeit zu kalibrieren, bewegen Sie den Schieberegler unter Maximum backward speed (Maximale Rückwärtsgeschwindigkeit) vorsichtig nach links oder rechts, um den Maximum backward speed value (Wert für maximale Rückwärtsgeschwindigkeit) schrittweise so auf einen negativen Wert zu justieren, dass der Wert Estimated speed (Geschätzte Geschwindigkeit) gleich oder ähnlich der in der Simulation angegebenen maximalen Geschwindigkeit ist. Wählen Sie Done (Erledigt) aus.
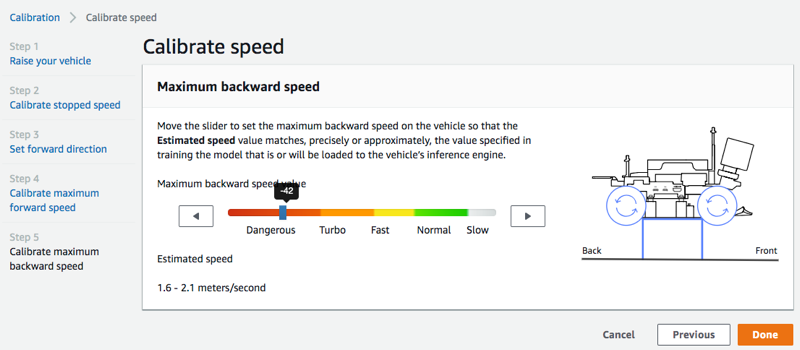
Anmerkung
Das DeepRacer AWS-Fahrzeug verwendet im autonomen Fahrmodus keine Rückwärtsgeschwindigkeit. Sie können die Rückwärtsgeschwindigkeit auf einen beliebigen Wert festlegen, mit dem Sie das Fahrzeug im manuellen Fahrmodus steuern können.
Damit ist die Kalibrierung der Höchstgeschwindigkeit Ihres DeepRacer AWS-Fahrzeugs abgeschlossen.
-
