Les traductions sont fournies par des outils de traduction automatique. En cas de conflit entre le contenu d'une traduction et celui de la version originale en anglais, la version anglaise prévaudra.
Calibrez votre DeepRacer véhicule AWS
Pour obtenir les meilleures performances, il est essentiel de calibrer certaines pièces physiques de votre DeepRacer véhicule AWS. Si vous utilisez un véhicule non calibré, vous risquez d'ajouter des incertitudes lors du test de votre modèle. Si la performance du véhicule n'est pas optimale, vous pouvez être tenté d'ajuster uniquement le code du modèle de deep learning. Toutefois, vous ne serez pas en mesure d'améliorer les performances du véhicule si la cause première est mécanique. Le calibrage vous permet d'ajuster les éléments mécaniques.
Pour étalonner votre DeepRacer véhicule AWS, définissez la plage de cycles de service
Les données de vitesse d'angle de direction maximum définissent l'envergure de l'espace d'action. Vous pouvez spécifier la vitesse maximale et l'angle de direction maximum pendant la formation en simulation. Lorsque vous déployez le modèle entraîné sur votre DeepRacer véhicule AWS pour une conduite sur une piste réelle, la vitesse maximale et l'angle de braquage du véhicule doivent être calibrés pour correspondre à ceux utilisés lors de l'entraînement par simulation.
Pour garantir que les expériences en conditions réelles correspondent aux expériences simulées, vous devez calibrer votre véhicule pour faire correspondre la vitesse maximale et les angles de direction maximum de la simulation et des conditions réelles. En général, il existe deux manières d'effectuer ce calibrage :
-
Définir l'espace d'action pendant la formation et calibrer le véhicule pour faire correspondre les paramètres.
-
Mesurer les performances réelles de votre véhicule et modifier les paramètres de l'espace d'action dans la simulation.
Un modèle fiable peut gérer certaines différences entre la simulation et les conditions réelles. Cependant, vous devez tester les deux approches et procéder à des itérations pour obtenir les meilleurs résultats.
Avant de commencer le calibrage, activez le module de calcul. Une fois qu'il est lancé et que le voyant d'alimentation devient bleu, activez la batterie du véhicule. Lorsque l'appareil a émis deux bips courts et un bip long, vous pouvez effectuer le calibrage.
Pour calibrer votre DeepRacer véhicule AWS en fonction des paramètres d'entraînement :
-
Suivez ces instructions pour accéder à votre véhicule et ouvrez la console de commande de l'appareil.
-
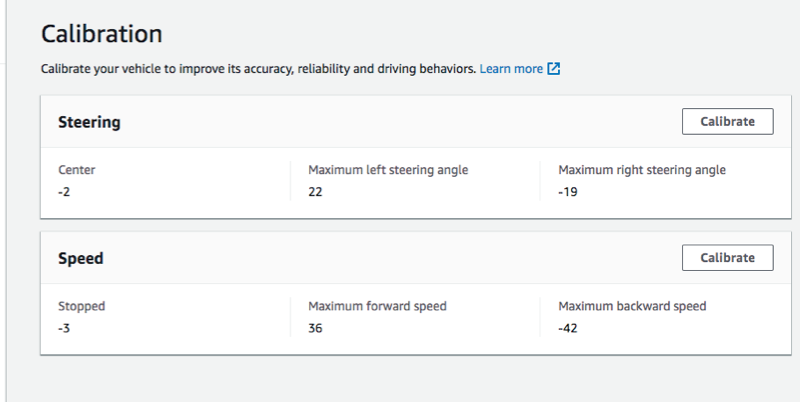
Choisissez Calibration (Calibrage) dans le volet de navigation principal.
-
Sur la page Calibration (Calibrage), choisissez Calibrate (Calibrer) dans Steering (Direction), puis suivez les étapes ci-dessous pour calibrer les angles de direction maximum du véhicule
-
Posez le véhicule sur le sol ou sur une autre surface ferme de manière à voir les roues pendant le calibrage de la direction. Choisissez Suivant.

Le changement de direction d'un véhicule sur une piste nécessite des angles de direction nettement plus petits que le changement de direction en l'air. Pour mesurer les angles de direction réels des roues, il est important que vous placiez le véhicule sur la surface de la piste.
-
Sous Center steering (Direction centrale), déplacez progressivement le curseur ou appuyez sur la flèche gauche ou droite jusqu'à la position où au moins l'une des roues avant est alignée sur la roue arrière du même côté. Choisissez Suivant.
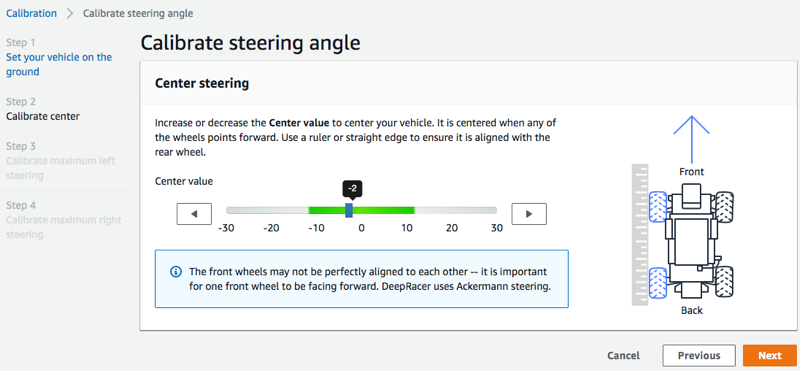
AWS DeepRacer utilise le système de direction avant Ackermann
pour faire tourner les roues à l'intérieur et à l'extérieur d'un virage. Cela signifie que les roues avant gauche et droite pivotent généralement à des angles différents. Dans AWS DeepRacer, l'étalonnage est effectué sur la valeur centrale. Vous devez donc ajuster les roues du côté sélectionné pour qu'elles soient alignées. Note
Assurez-vous de bien calibrer votre DeepRacer véhicule AWS afin qu'il puisse maintenir la direction centrale aussi droite que possible. Vous pouvez tester ce comportement en poussant manuellement le véhicule afin de vérifier qu'il suit une trajectoire droite.
-
Sous Maximum left steering (Direction vers la gauche maximum), déplacez progressivement le curseur vers la gauche ou appuyez sur la flèche gauche jusqu'à ce que les roues avant du véhicule ne puissent plus pivoter vers la gauche. Vous devez entendre un petit bruit. Si vous entendez un grand bruit, cela signifie que vous êtes allé trop loin. La position correspond à l'angle de direction vers la gauche maximum. Si vous avez limité votre angle de direction dans l'espace d'action simulé, faites correspondre les valeurs ici. Choisissez Suivant.
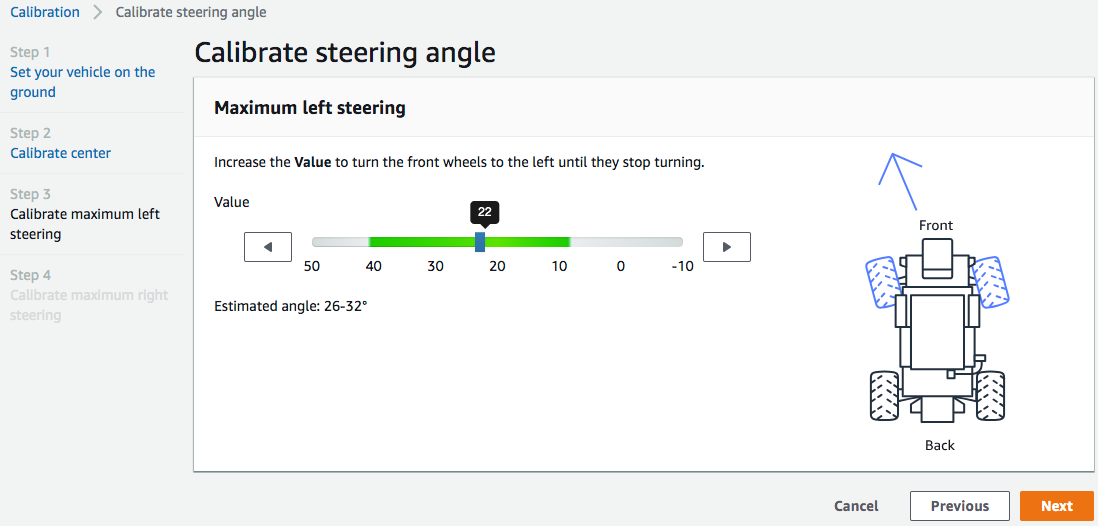
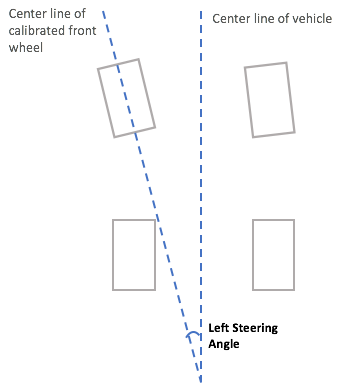
Pour mesurer l'angle de direction vers la gauche maximum réel, dessinez un axe central pour le véhicule, marquez les deux points périphériques de la roue avant sélectionnée pour le calibrage et dessinez l'axe central de cette roue avant jusqu'à l'intersection avec l'axe central du véhicule. Utilisez un rapporteur pour mesurer l'angle. Reportez-vous à la figure ci-dessous. Si vous voulez faire correspondre l'angle réel de votre formation, vous pouvez définir la même valeur dans l'espace d'action de votre prochaine tâche de formation.
-
Sous Maximum right steering (Direction vers la droite maximum), déplacez progressivement le curseur vers la droite jusqu'à ce que les roues avant ne puissent plus pivoter vers la droite. Vous devez entendre un petit bruit. Si vous entendez un grand bruit, cela signifie que vous êtes allé trop loin. La position correspond à l'angle de direction vers la droite maximum. Si vous avez limité votre angle de direction dans l'espace d'action simulé, faites correspondre les valeurs ici. Sélectionnez Done (Exécuté).
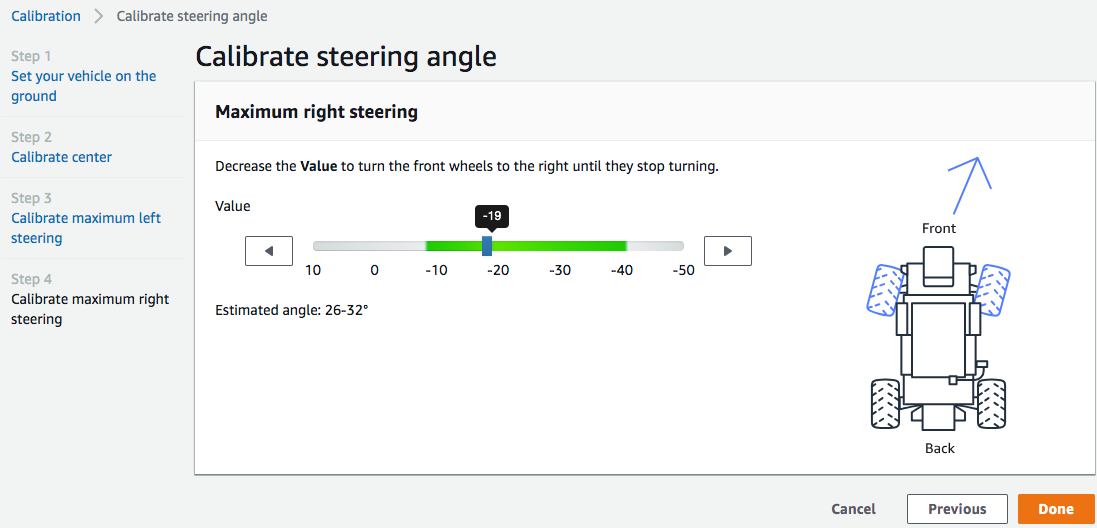
Pour mesurer l'angle de direction vers la droite maximum réel, suivez les mêmes étapes que celles utilisées pour mesurer l'angle de direction vers la gauche maximum.
L'étalonnage de la direction de votre DeepRacer véhicule AWS est terminé.
-
-
Pour calibrer la vitesse maximale du véhicule, choisissez Calibrate (Calibrer) dans Speed (Vitesse) sur la page Calibration (Calibrage), puis suivez les étapes ci-dessous.
-
Surélevez le véhicule de manière à ce que les roues puissent tourner librement. Choisissez Next (Suivant) sur la console de commande l'appareil.

Note
Si la vitesse définie pour le véhicule est trop élevée, le véhicule peut rouler trop vite pendant le calibrage et endommager l'environnement, le véhicule lui-même ou d'autres véhicules à proximité. Vous devez surélever le véhicule, comme indiqué ici. Vous ne devez pas le garder dans vos mains.
-
Pour calibrer la vitesse d'arrêt, appuyez sur la flèche gauche ou droite pour modifier progressivement Stopped value (Valeur d'arrêt) sous Stopped speed (Vitesse d'arrêt) sur la console de commande de l'appareil jusqu'à ce que les roues cessent de tourner. Choisissez Suivant.
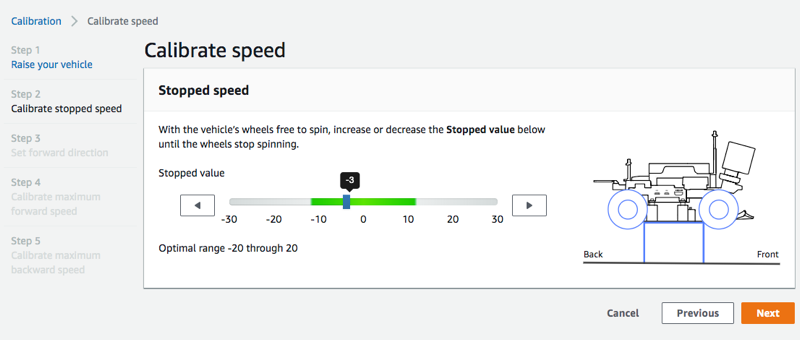
Note
Si vous appuyez encore plus vers la droite ou vers la gauche pour Stopped value (Valeur d'arrêt) jusqu'à ce que vous entendiez des bruits, les roues sont sur le point de tourner. Le point neutre idéal se situe entre les deux valeurs. Par exemple, si vous commencez à entendre un bruit à 16 sur la gauche et à -4 sur la droite, la valeur d'arrêt optimale doit être 10.
-
Pour définir la direction vers l'avant du véhicule, placez le véhicule comme illustré à l'écran et sur l'image ci-dessous, puis appuyez sur la flèche gauche ou droite pour faire pivoter les roues. Si les roues tournent dans le sens des aiguilles d'une montre, cela signifie que la marche avant est définie. Si ce n'est pas le cas, activez/désactivez Reverse direction (Inverser la direction). Choisissez Suivant.
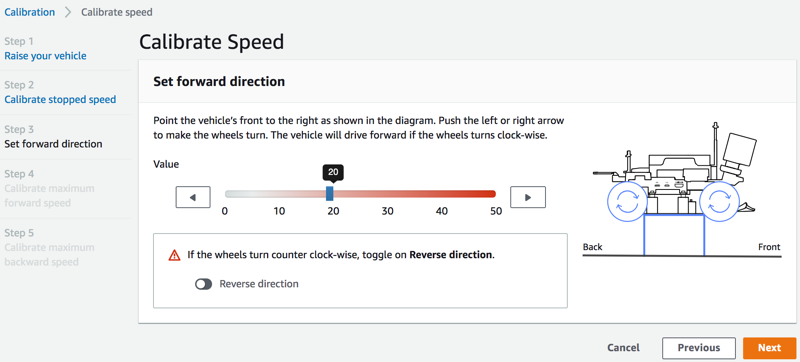
Note
Les véhicules distribués àAWS re:Invent 2018 peuvent avoir leur direction avant réglée en sens inverse. Dans ce cas, assurez-vous d'activer/désactiver Reverse direction (Inverser la direction).
-
Pour calibrer la vitesse maximale en marche avant, sous Maximum forward speed (Vitesse maximale en marche avant), déplacez doucement le curseur vers la gauche ou vers la droite pour ajuster progressivement le chiffre Maximum forward speed value (Valeur de vitesse maximale en marche avant) vers une valeur positive afin que la valeur de Estimated speed (Vitesse estimée) soit égale ou similaire à la vitesse maximale spécifiée dans la simulation. Choisissez Suivant.
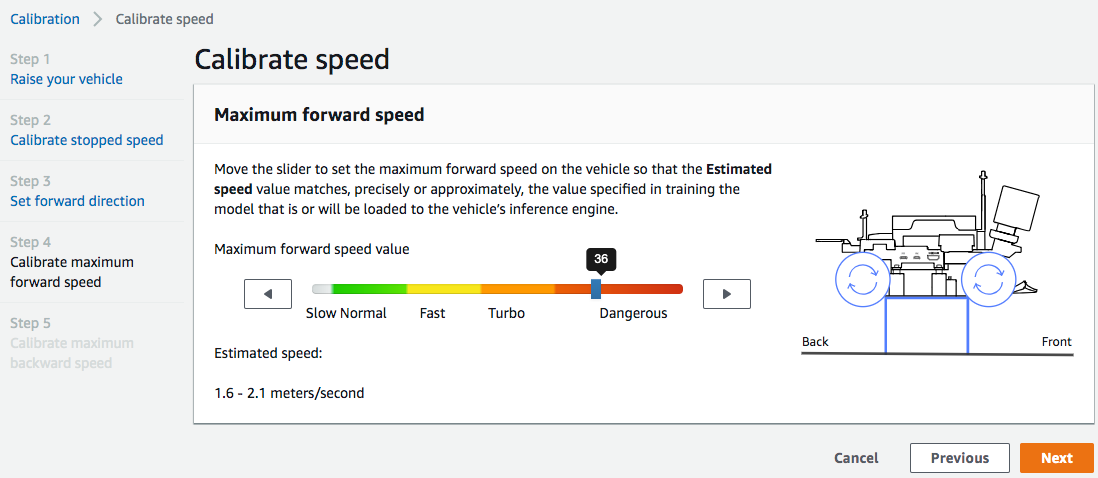
Note
La vitesse maximale réelle de votre véhicule dépend de la friction de la surface de la piste ainsi que du niveau de la batterie du véhicule. Pour plus de flexibilité, vous pouvez définir une limite d'accélération du véhicule 20 à 30 % supérieure à la vitesse maximale spécifiée pour la formation dans la simulation. En règle générale, vous devez définir la valeur de vitesse maximale dans la zone verte. Au-dessus, votre véhicule est susceptible de rouler trop rapidement et le risque de dégradation est plus élevé. De plus, l'espace d'action pour la formation ne prend pas en charge la vitesse maximale supérieure à 2 m/s.
-
Pour calibrer la vitesse maximale en marche arrière, sous Maximum backward speed (Vitesse maximale en marche arrière), déplacez doucement le curseur vers la gauche ou vers la droite pour ajuster progressivement le chiffre Maximum backward speed value (Valeur de vitesse maximale en marche arrière) vers une valeur négative afin que la valeur de Estimated speed (Vitesse estimée) soit égale ou similaire à la vitesse maximale spécifiée dans la simulation. Sélectionnez Done (Exécuté).
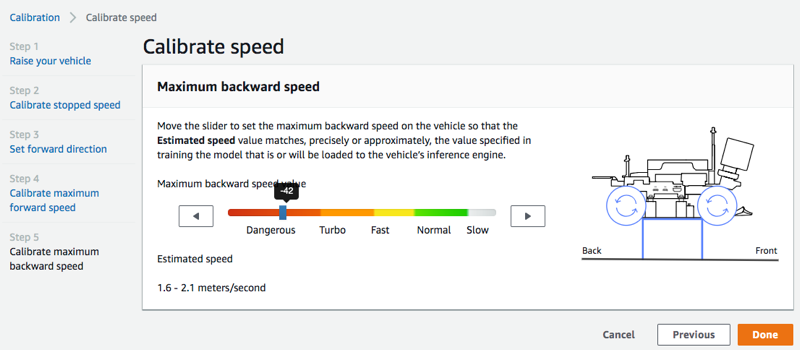
Note
Le DeepRacer véhicule AWS n'utilise pas la vitesse arrière en mode conduite autonome. Vous pouvez définir la vitesse en marche arrière sur n'importe quelle valeur contrôlable facilement en mode de conduite manuelle.
Ceci conclut le calibrage de la vitesse maximale de votre DeepRacer véhicule AWS.
-
