Les traductions sont fournies par des outils de traduction automatique. En cas de conflit entre le contenu d'une traduction et celui de la version originale en anglais, la version anglaise prévaudra.
Paramètres d'entrée de la fonction de DeepRacer récompense AWS
La fonction de DeepRacer récompense AWS prend un objet de dictionnaire en entrée.
def reward_function(params) : reward = ... return float(reward)
L'objet de dictionnaire params contient les paires clé-valeur suivantes :
{ "all_wheels_on_track": Boolean, # flag to indicate if the agent is on the track "x": float, # agent's x-coordinate in meters "y": float, # agent's y-coordinate in meters "closest_objects": [int, int], # zero-based indices of the two closest objects to the agent's current position of (x, y). "closest_waypoints": [int, int], # indices of the two nearest waypoints. "distance_from_center": float, # distance in meters from the track center "is_crashed": Boolean, # Boolean flag to indicate whether the agent has crashed. "is_left_of_center": Boolean, # Flag to indicate if the agent is on the left side to the track center or not. "is_offtrack": Boolean, # Boolean flag to indicate whether the agent has gone off track. "is_reversed": Boolean, # flag to indicate if the agent is driving clockwise (True) or counter clockwise (False). "heading": float, # agent's yaw in degrees "objects_distance": [float, ], # list of the objects' distances in meters between 0 and track_length in relation to the starting line. "objects_heading": [float, ], # list of the objects' headings in degrees between -180 and 180. "objects_left_of_center": [Boolean, ], # list of Boolean flags indicating whether elements' objects are left of the center (True) or not (False). "objects_location": [(float, float),], # list of object locations [(x,y), ...]. "objects_speed": [float, ], # list of the objects' speeds in meters per second. "progress": float, # percentage of track completed "speed": float, # agent's speed in meters per second (m/s) "steering_angle": float, # agent's steering angle in degrees "steps": int, # number steps completed "track_length": float, # track length in meters. "track_width": float, # width of the track "waypoints": [(float, float), ] # list of (x,y) as milestones along the track center }
La référence technique plus détaillée pour les paramètres d'entrée est expliquée ci-après.
all_wheels_on_track
Type : Boolean
Plage : (True:False)
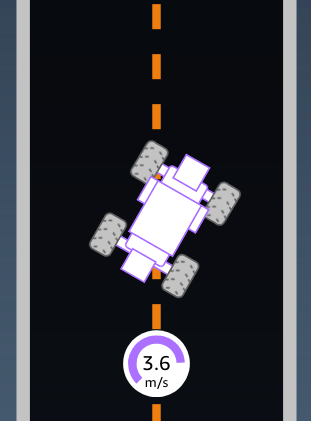
Indicateur Boolean qui spécifie si l'agent est sur la piste ou hors piste. Il est hors piste (False) si l'une de ses roues est en dehors des limites de la piste. Il est sur la piste (True) si toutes les roues sont à l'intérieur des limites de la piste. L'illustration suivante montre que l'agent est sur la piste.

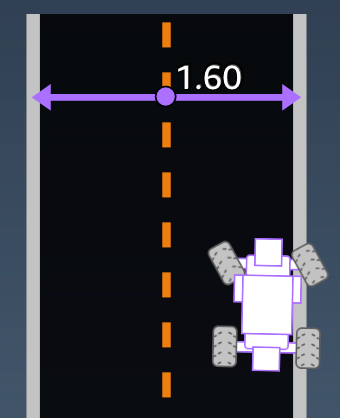
L'illustration suivante montre que l'agent est hors piste.

Exemple : Fonction de récompense utilisant le paramètre all_wheels_on_track
def reward_function(params): ############################################################################# ''' Example of using all_wheels_on_track and speed ''' # Read input variables all_wheels_on_track = params['all_wheels_on_track'] speed = params['speed'] # Set the speed threshold based your action space SPEED_THRESHOLD = 1.0 if not all_wheels_on_track: # Penalize if the car goes off track reward = 1e-3 elif speed < SPEED_THRESHOLD: # Penalize if the car goes too slow reward = 0.5 else: # High reward if the car stays on track and goes fast reward = 1.0 return float(reward)
closest_waypoints
Type : [int, int]
Plage : [(0:Max-1),(1:Max-1)]
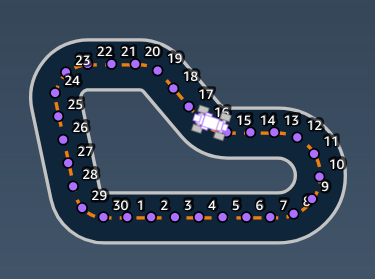
Index de base zéro des deux éléments waypoints les plus proches de la position actuelle de l'agent (x, y). La distance est mesurée par la distance euclidienne par rapport au centre de l'agent. Le premier élément fait référence au point de route le plus proche à l'arrière de l'agent et le second élément fait référence au point de route le plus proche à l'avant de l'agent. Max est la longueur de la liste des points de route. Dans l'illustration illustrée dans waypoints, la closest_waypoints serait [16, 17].
Exemple : Fonction de récompense utilisant le paramètre closest_waypoints.
L'exemple de fonction de récompense suivant illustre l'utilisation de waypoints, closest_waypoints et heading pour calculer les récompenses immédiates.
AWS DeepRacer prend en charge les bibliothèques suivantes : math NumPy SciPy, random et Shapely. Pour en utiliser une, ajoutez une instruction d'importationimport , au-dessus de la définition de votre fonction,supported librarydef function_name(parameters).
# Place import statement outside of function (supported libraries: math, random, numpy, scipy, and shapely) # Example imports of available libraries # # import math # import random # import numpy # import scipy # import shapely import math def reward_function(params): ############################################################################### ''' Example of using waypoints and heading to make the car point in the right direction ''' # Read input variables waypoints = params['waypoints'] closest_waypoints = params['closest_waypoints'] heading = params['heading'] # Initialize the reward with typical value reward = 1.0 # Calculate the direction of the center line based on the closest waypoints next_point = waypoints[closest_waypoints[1]] prev_point = waypoints[closest_waypoints[0]] # Calculate the direction in radius, arctan2(dy, dx), the result is (-pi, pi) in radians track_direction = math.atan2(next_point[1] - prev_point[1], next_point[0] - prev_point[0]) # Convert to degree track_direction = math.degrees(track_direction) # Calculate the difference between the track direction and the heading direction of the car direction_diff = abs(track_direction - heading) if direction_diff > 180: direction_diff = 360 - direction_diff # Penalize the reward if the difference is too large DIRECTION_THRESHOLD = 10.0 if direction_diff > DIRECTION_THRESHOLD: reward *= 0.5 return float(reward)
closest_objects
Type : [int, int]
Plage : [(0:len(objects_location)-1),
(0:len(objects_location)-1)]
Index de base zéro des deux objets les plus proches de la position actuelle de l'agent (x, y). Le premier index fait référence à l'objet le plus proche derrière l'agent, et le second index fait référence à l'objet le plus proche devant l'agent. S'il n'y a qu'un seul objet, les deux index sont 0.
distance_from_center
Type : float
Plage : 0:~track_width/2
Écart, en mètres, entre le centre de l'agent et le centre de la piste. L'écart maximum pouvant être observé se produit lorsque l'une des roues de l'agent est au-delà d'une limite de la piste et, en fonction de la largeur de la bordure de la piste, peut être légèrement inférieure ou supérieure à la moitié de la valeur de track_width.

Exemple : Fonction de récompense utilisant le paramètre distance_from_center
def reward_function(params): ################################################################################# ''' Example of using distance from the center ''' # Read input variable track_width = params['track_width'] distance_from_center = params['distance_from_center'] # Penalize if the car is too far away from the center marker_1 = 0.1 * track_width marker_2 = 0.5 * track_width if distance_from_center <= marker_1: reward = 1.0 elif distance_from_center <= marker_2: reward = 0.5 else: reward = 1e-3 # likely crashed/ close to off track return float(reward)
heading
Type : float
Plage : -180:+180
Direction, en degrés, de l'agent par rapport à l'axe des X du système de coordonnées.

Exemple : Fonction de récompense utilisant le paramètre heading
Pour plus d’informations, consultez closest_waypoints.
is_crashed
Type : Boolean
Plage : (True:False)
Indicateur booléen pour indiquer si l'agent a percuté un autre objet (True) ou non (False) en tant que statut d'achèvement.
is_left_of_center
Type : Boolean
Plage : [True : False]
Indicateur Boolean qui indique si l'agent est sur le côté gauche de la piste (True) ou sur le côté droit de la piste (False) par rapport au centre de la piste.
is_offtrack
Type : Boolean
Plage : (True:False)
Indicateur booléen pour indiquer si l'agent a quitté la piste (True) ou non (False) comme statut d'achèvement.
is_reversed
Type : Boolean
Plage : [True:False]
Indicateur booléen pour indiquer si l'agent roule dans le sens des aiguilles d'une montre (True) ou dans le sens inverse des aiguilles d'une montre (False).
Il est utilisé lorsque vous activez un changement de direction pour chaque épisode.
objects_distance
Type : [float, … ]
Plage : [(0:track_length), … ]
Liste des distances entre les objets de l'environnement par rapport à la ligne de départ. Le ie élément mesure la distance en mètres entre le ie objet et la ligne de départ le long de la ligne centrale de la piste.
Note
abs | (var1) - (var2) | = à quelle distance la voiture se trouve d'un objet, QUAND var1 = ["objects_distance"] [index] et var2 = params ["progress"] *params ["track_length"]
Pour obtenir un index de l'objet le plus proche devant le véhicule et de l'objet le plus proche derrière le véhicule, utilisez le paramètre « closest_objects ».
objects_heading
Type : [float, … ]
Plage : [(-180:180), … ]
Liste des caps des objets en degrés. Le ie élément mesure le cap du ie objet. Pour les objets immobiles, les caps sont égaux à 0. Pour un véhicule bot, la valeur de l'élément correspondant est l'angle de cap du véhicule.
objects_left_of_center
Type : [Boolean, … ]
Plage : [True|False, … ]
Liste d'indicateurs booléens. La valeur du ie élément i indique si le ie objet se trouve à gauche (True) ou à droite (False) du centre de la piste.
objects_location
Type : [(x,y), … ]
Plage : [(0:N,0:N), … ]
Liste de tous les emplacements d'objets, chaque emplacement étant un tuple de (x, y).
La taille de la liste est égale au nombre d'objets sur la piste. Notez que des objets peuvent être les obstacles immobiles et des véhicules en mouvement.
objects_speed
Type : [float, … ]
Plage : [(0:12.0), … ]
Liste de vitesses (mètres par seconde) pour les objets sur la piste. Pour les objets immobiles, les vitesses sont égales à 0. Pour un véhicule robot, la valeur est la vitesse que vous avez définie lors de l'entraînement.
progress
Type : float
Plage : 0:100
Pourcentage de piste parcouru.
Exemple : Fonction de récompense utilisant le paramètre progress
Pour de plus amples informations, veuillez consulter steps.
speed
Type : float
Plage : 0.0:5.0
Vitesse observée de l'agent, en mètres par seconde (m/s).
Exemple : Fonction de récompense utilisant le paramètre speed
Pour de plus amples informations, veuillez consulter all_wheels_on_track.
steering_angle
Type : float
Plage : -30:30
Angle de direction, en degrés, des roues avant par rapport à l'axe central de l'agent. Le signe moins (-) indique une direction vers la droite et le signe plus (+) indique une direction vers la gauche. L'axe central de l'agent n'est pas nécessairement parallèle à la ligne centrale de la piste, comme illustré ci-après.

Exemple : Fonction de récompense utilisant le paramètre steering_angle
def reward_function(params): ''' Example of using steering angle ''' # Read input variable abs_steering = abs(params['steering_angle']) # We don't care whether it is left or right steering # Initialize the reward with typical value reward = 1.0 # Penalize if car steer too much to prevent zigzag ABS_STEERING_THRESHOLD = 20.0 if abs_steering > ABS_STEERING_THRESHOLD: reward *= 0.8 return float(reward)
steps
Type : int
Plage : 0:Nstep
Nombre d'étapes effectuées. Une étape correspond à une action effectuée par l'agent selon la politique actuelle.
Exemple : Fonction de récompense utilisant le paramètre steps
def reward_function(params): ############################################################################# ''' Example of using steps and progress ''' # Read input variable steps = params['steps'] progress = params['progress'] # Total num of steps we want the car to finish the lap, it will vary depends on the track length TOTAL_NUM_STEPS = 300 # Initialize the reward with typical value reward = 1.0 # Give additional reward if the car pass every 100 steps faster than expected if (steps % 100) == 0 and progress > (steps / TOTAL_NUM_STEPS) * 100 : reward += 10.0 return float(reward)
track_length
Type : float
Plage : [0:Lmax]
La longueur de la piste en mètres. Lmax is track-dependent.
track_width
Type : float
Plage : 0:Dtrack
Largeur de la piste, en mètres.
Exemple : Fonction de récompense utilisant le paramètre track_width
def reward_function(params): ############################################################################# ''' Example of using track width ''' # Read input variable track_width = params['track_width'] distance_from_center = params['distance_from_center'] # Calculate the distance from each border distance_from_border = 0.5 * track_width - distance_from_center # Reward higher if the car stays inside the track borders if distance_from_border >= 0.05: reward = 1.0 else: reward = 1e-3 # Low reward if too close to the border or goes off the track return float(reward)
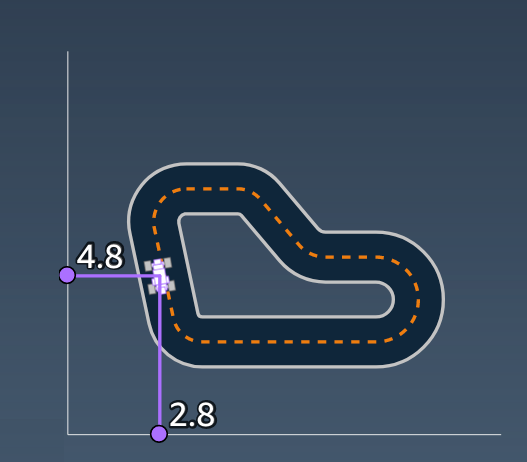
x, y
Type : float
Plage : 0:N
Emplacement, en mètres, du centre de l'agent le long des axes X et Y de l'environnement simulé contenant la piste. L'origine se trouve dans l'angle inférieur gauche de l'environnement simulé.
waypoints
Type : list de [float, float]
Plage : [[xw,0,yw,0] …
[xw,Max-1,
yw,Max-1]]
Liste ordonnée des jalons Max dépendants des pistes le long du centre de la piste. Chaque jalon est décrit par une coordonnée de (xw,i, yw,i). Pour une piste en anneau, le premier et le dernier points de route sont identiques. Pour une piste rectiligne ou autre piste sans anneau, le premier et le dernier points de route sont différents.
Exemple : Fonction de récompense utilisant le paramètre waypoints
Pour plus d'informations, voir closest_waypoints.
