Terjemahan disediakan oleh mesin penerjemah. Jika konten terjemahan yang diberikan bertentangan dengan versi bahasa Inggris aslinya, utamakan versi bahasa Inggris.
Mengendarai DeepRacer kendaraan AWS Anda
Setelah Untuk menyiapkan DeepRacer kendaraan AWS AWS, Anda dapat mulai mengemudikan kendaraan secara manual atau membiarkannya mengemudi sendiri, menggunakan konsol perangkat kendaraan.
Untuk mengemudi sendiri, Anda harus melatih DeepRacer model AWS dan memiliki artifact model terlatih yang di-deploy ke kendaraan. Dalam mode balap mandiri, model yang berjalan di mesin inferensi mengendalikan arah dan kecepatan kendaraan. Tanpa model terlatih yang diunduh ke kendaraan, Anda dapat menggunakan konsol perangkat kendaraan untuk mengemudikan kendaraan secara manual.
Banyak faktor yang mempengaruhi performa kendaraan dalam mengemudi sendiri. Mereka termasuk model terlatih, kalibrasi kendaraan, syarat lintasan, seperti gesekan permukaan, kontras warna dan pantulan cahaya, dll. Agar kendaraan Anda mencapai performa yang optimal, Anda harus memastikan bahwa transfer model dari simulasi ke dunia nyata adalah seakurat, relevan dan bermakna. Untuk informasi selengkapnya, lihat Optimalkan DeepRacer model AWS pelatihan untuk lingkungan nyata.
Mengendarai DeepRacer kendaraan AWS Anda secara manual
Jika Anda belum melatih model apa pun atau belum men-deploy model terlatih untuk DeepRacer kendaraan AWS, Anda tidak bisa membiarkannya mengemudi sendiri. Tetapi Anda bisa mengendarainya secara manual.
Untuk mengendarai DeepRacer kendaraan AWS AWS secara manual, ikuti langkah-langkah di bawah ini.
Untuk mengendarai DeepRacer Kendaraan AWS AWS Secara Manual
-
Dengan DeepRacer kendaraan AWS AWS yang terhubung ke jaringan Wi-Fi, ikuti Instruksi untuk masuk ke konsol kontrol perangkat kendaraan.
-
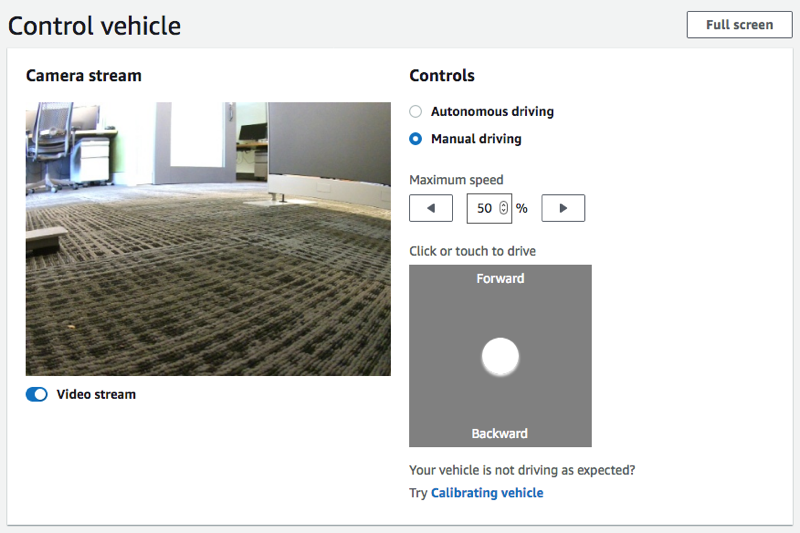
Pada halaman Kendaraan Kontrol, pilih Mengemudi manual di bawah Kontrol.
-
Di bawah Klik atau sentuh untuk mengemudi, klik atau sentuh posisi di dalam bantalan penggerak untuk menggerakkan kendaraan. Citra yang diambil dari kamera depan kendaraan ditampilkan di pemutar video di bawah Streaming kamera.
-
Untuk mengaktifkan atau menonaktifkan streaming video di konsol perangkat saat Anda mengemudikan kendaraan, alihkan sakelar pilihan Streaming video di bawah tampilan Streaming kamera.
-
Ulangi dari Langkah 3 untuk mengemudikan kendaraan ke lokasi yang berbeda.
Mengendarai DeepRacer kendaraan AWS Anda secara otonom
Untuk mulai mengemudi sendiri, letakkan kendaraan di lintasan fisik dan lakukan hal berikut:
Untuk mengendarai DeepRacer kendaraan AWS AWS Anda secara mandiri
-
Ikuti Instruksi untuk masuk ke konsol perangkat kendaraan, lalu lakukan hal berikut untuk mengemudi sendiri:
-
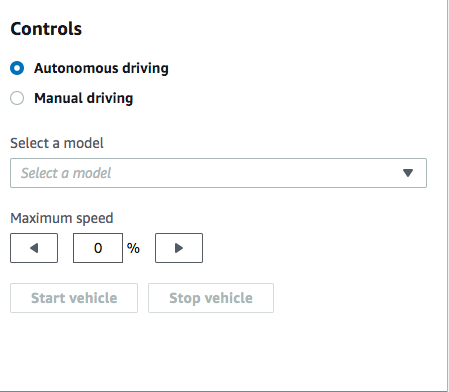
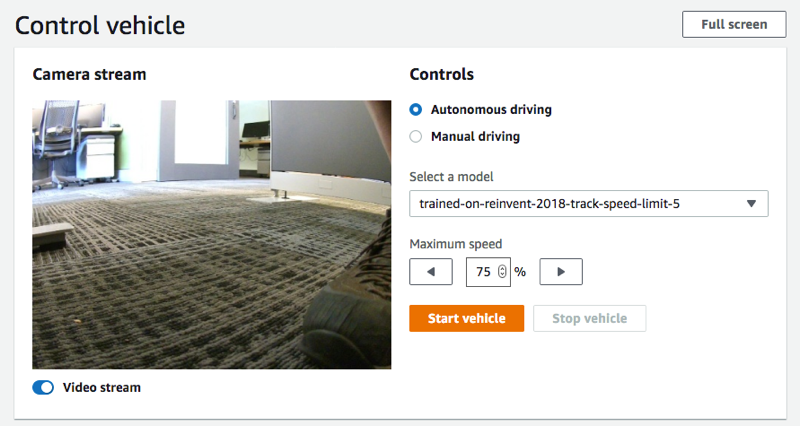
Pada halaman Kendaraan Kontrol, pilih Mengemudi sendiri di bawah Kontrol.
-
Dari daftar menurun Pilih model, pilih model yang diunggah. Kemudian pilih Model beban. Ini akan mulai memuat model ke mesin inferensi. Prosesnya memakan waktu sekitar 10 detik untuk menyelesaikannya.
-
Sesuaikan pengaturan Kecepatan maksimum kendaraan menjadi persentase dari kecepatan maksimum yang digunakan dalam pelatihan model.
Faktor-faktor tertentu, seperti gesekan permukaan lintasan nyata, dapat mengurangi kecepatan maksimum kendaraan dari kecepatan maksimum yang digunakan dalam pelatihan. Anda harus bereksperimen untuk menemukan pengaturan yang optimal.
-
Pilih Mulai kendaraan untuk mengatur kendaraan untuk mengemudi sendiri.
-
Untuk mengaktifkan atau menonaktifkan streaming video di konsol perangkat saat Anda mengemudikan kendaraan, alihkan sakelar pilihan Streaming video di bawah tampilan Streaming kamera.
-
Tonton drive kendaraan di lintasan fisik atau pemutar video streaming di konsol perangkat.
-
Untuk menghentikan kendaraan, pilih Hentikan kendaraan.
Ulangi dari Langkah 3 untuk menjalankan yang lain dengan model yang sama atau berbeda.
