As traduções são geradas por tradução automática. Em caso de conflito entre o conteúdo da tradução e da versão original em inglês, a versão em inglês prevalecerá.
Introdução ao MW32x AWS IoT Kit de iniciação
Importante
Essa integração de referência está hospedada no Amazon-FreeRTOS repositório que está obsoleto. Recomendamos começar aqui ao criar um novo projeto. Se você já tem um projeto FreeRTOS existente com base no repositório agora Amazon-FreeRTOS obsoleto, consulte o. Amazon-FreeRTOS Guia de migração do repositório Github
O AWS IoT Starter Kit é um kit de desenvolvimento baseado no mais recente microcontrolador Cortex M4 integrado da NXP 88MW320/88MW322, que integra 802. 11b/g/n Wi-Fi em um único chip microcontrolador. O kit de desenvolvimento é certificado pela FCC. Para obter mais informações, consulte o catálogo do AWS Partner Device
Este guia de conceitos básicos mostra como fazer a compilação cruzada da aplicação junto com o SDK em um computador host e, em seguida, carregar o arquivo binário gerado na placa usando as ferramentas fornecidas com o SDK. Quando a aplicação começa a ser executada na placa, é possível depurá-la ou interagir com ela a partir do console serial do computador host.
O Ubuntu 16.04 é a plataforma host compatível para desenvolvimento e depuração. Será possível usar outras plataformas, mas não há suporte oficial para elas. Você deve ter permissões para instalar o software na plataforma host. As ferramentas externas a seguir são necessárias para criar o SDK:
-
Plataforma host do Ubuntu 16.04
-
Cadeia de ferramentas do ARM versão 4_9_2015q3
-
IDE do Eclipse 4.9.0
A cadeia de ferramentas do ARM é necessária para fazer a compilação cruzada da aplicação e do SDK. O SDK aproveita as versões mais recentes da cadeia de ferramentas para otimizar a marca da imagem e encaixar mais funcionalidades em menos espaço. Este guia considera que você esteja usando a versão 4_9_2015q3 da cadeia de ferramentas. Não é recomendável usar versões mais antigas da cadeia de ferramentas. O kit de desenvolvimento é pré-instalado com o firmware do projeto de demonstração do microcontrolador sem fios.
Tópicos
Configuração do hardware
Conecte a placa MW32x ao laptop usando um cabo mini-USB para USB. Conecte o cabo mini-USB ao único conector mini-USB presente na placa. Não é necessário alterar o jumper.
Se a placa estiver conectada a um laptop ou computador desktop, não será necessário obter uma fonte de alimentação externa.
Essa conexão USB fornece o seguinte:
-
Console de acesso à placa. Uma tty/com porta virtual é registrada no host de desenvolvimento que pode ser usada para acessar o console.
-
Acesso JTAG à placa. Isso pode ser usado para carregar ou descarregar imagens de firmware na memória RAM ou flash da placa, ou para fins de depuração.
Configuração do ambiente de desenvolvimento
Para fins de desenvolvimento, o requisito mínimo é a cadeia de ferramentas do ARM e as ferramentas fornecidas com o SDK. As seções a seguir fornecem detalhes sobre a configuração da cadeia de ferramentas do ARM.
Conjunto de ferramentas para GNU
O SDK oferece suporte oficial à cadeia de ferramentas do compilador GCC. A cadeia de ferramentas de compilação cruzada para GNU do ARM está disponível na cadeia de ferramentas integradas do ARM para GNU 4.9-2015-q3-update
O sistema de compilação é configurado para usar a cadeia de ferramentas do GNU por padrão. Os Makefiles consideram os binários da cadeia de ferramentas do compilador GNU como disponíveis no CAMINHO do usuário e podem ser invocados a partir dos Makefiles. Os Makefiles também consideram os nomes dos arquivos dos binários da cadeia de ferramentas do GNU como prefixados com arm-none-eabi-.
A cadeia de ferramentas do GCC pode ser usada com o GDB para depurar com o OpenOCD (incluído no SDK). Isso fornece o software que interage com o JTAG.
Recomendamos a versão 4_9_2015q3 da cadeia de ferramentas gcc-arm integrada.
Procedimento de configuração da cadeia de ferramentas do Linux
Siga estas etapas para configurar a cadeia de ferramentas do GCC no Linux.
-
Faça o download da cadeia de ferramentas tarball disponível na cadeia de ferramentas integradas do ARM para GNU 4.9-2015-q3-update
. O arquivo é gcc-arm-none-eabi-4_9-2015q3-20150921-linux.tar.bz2. -
Copie o arquivo para um diretório de sua escolha. Não deve haver espaços no nome do diretório.
-
Use o comando a seguir para descompactar o arquivo.
tar –vxffilename -
Adicione o caminho da cadeia de ferramentas instalada ao PATH do sistema. Por exemplo, anexe a linha a seguir no final do arquivo
.profilelocalizado no diretório/home/.user-namePATH=$PATH:path to gcc-arm-none-eabit-4_9_2015_q3/bin
nota
Novas distribuições do Ubuntu podem ter uma versão do Debian do Compilador cruzado do GCC. Nesse caso, você deve remover o Compilador cruzado nativo e seguir o procedimento de configuração acima.
Trabalho com um host de desenvolvimento do Linux
Toda distribuição moderna do desktop Linux, como o Ubuntu ou Fedora, pode ser usada. No entanto, recomendamos atualizar para a versão mais recente. As etapas a seguir foram verificadas para funcionar no Ubuntu 16.04 e consideram que você está usando essa versão.
Instalação de pacotes
O SDK inclui um script para permitir a configuração rápida do ambiente de desenvolvimento em uma máquina Linux configurada recentemente. O script tenta detectar o tipo de máquina e instalar o software adequado automaticamente, incluindo bibliotecas C, biblioteca USB, biblioteca FTDI, ncurses, python e latex. Nesta seção, o nome genérico do diretório amzsdk_bundle-x.y.z
-
Navegue até o diretório
amzsdk_bundle-x.y.z/./lib/third_party/mcu_vendor/marvell/WMSDK/mw320/sdk/tools/bin/installpkgs.sh
Evitando o sudo
Neste guia, a operação flashprog usa o script flashprog.py para instalar o NAND da placa, conforme explicado abaixo. Da mesma forma, a operação ramload usa o script ramload.py para copiar a imagem do firmware do host diretamente para a RAM do microcontrolador, sem instalar o NAND.
Você pode configurar seu host de desenvolvimento Linux para realizar as operações flashprog e ramload sem exigir o comando sudo todas as vezes. Para fazer isso, execute o comando a seguir.
./lib/third_party/mcu_vendor/marvell/WMSDK/mw320/sdk/tools/bin/perm_fix.sh
nota
Você deve configurar suas permissões de host de desenvolvimento Linux dessa forma para garantir uma experiência suave no IDE do Eclipse.
Configuração do console serial
Insira o cabo USB no slot USB do host Linux. Isso aciona a detecção do dispositivo. Você deve ver mensagens como as seguintes no arquivo /var/log/messages ou depois de executar o comando dmesg.
Jan 6 20:00:51 localhost kernel: usb 4-2: new full speed USB device using uhci_hcd and address 127 Jan 6 20:00:51 localhost kernel: usb 4-2: configuration #1 chosen from 1 choice Jan 6 20:00:51 localhost kernel: ftdi_sio 4-2:1.0: FTDI USB Serial Device converter detected Jan 6 20:00:51 localhost kernel: ftdi_sio: Detected FT2232C Jan 6 20:00:51 localhost kernel: usb 4-2: FTDI USB Serial Device converter now attached to ttyUSB0 Jan 6 20:00:51 localhost kernel: ftdi_sio 4-2:1.1: FTDI USB Serial Device converter detected Jan 6 20:00:51 localhost kernel: ftdi_sio: Detected FT2232C Jan 6 20:00:51 localhost kernel: usb 4-2: FTDI USB Serial Device converter now attached to ttyUSB1
Verifique se dois dispositivos ttyUSB foram criados. O segundo ttyUSB é o console de série. No exemplo acima, isso é chamado de "ttyUSB1".
Neste guia, usamos o minicom para ver a saída do console de série. Você também pode usar outros programas seriais, como putty. Execute o comando a seguir para executar o minicom no modo de configuração.
minicom –s
No minicom, navegue até Configuração de porta serial e capture as seguintes configurações.
| A - Serial Device : /dev/ttyUSB1 | B – Lockfile Location : /var/lock | C - Callin Program : | D - Callout Program : | E - Bps/Par/Bits : 115200 8N1 | F – Hardware Flow Control : No | G – Software Flow Control : No
Você pode salvar essas configurações no minicom para uso futuro. A janela do minicom agora exibe mensagens do console de série.
Escolha a janela do console de série e pressione a tecla Enter. Isso exibe um hash (#) na tela.
nota
As placas de desenvolvimento incluem um dispositivo de chip FTDI. O dispositivo FTDI expõe duas interfaces USB para o host. A primeira interface está associada à funcionalidade JTAG do MCU e a segunda interface está associada à porta física UARTx do MCU.
Instalação do OpenOCD
O OpenOCD é um software que fornece depuração, programação no sistema e teste de verificação de limites para dispositivos de destino incorporados.
É necessário ter o OpenOCD versão 0.9. Também é necessário para a funcionalidade do Eclipse. Se uma versão anterior, como a versão 0.7, foi instalada em seu host Linux, remova esse repositório com o comando apropriado para a distribuição Linux que você está usando atualmente.
Execute o comando padrão do Linux para instalar o OpenOCD,
apt-get install openocd
Se o comando acima não instalar a versão 0.9 ou posterior, use o procedimento a seguir para baixar e compilar o código-fonte do openocd.
Como instalar o OpenOCD
-
Execute o comando a seguir para instalar libusb-1.0.
sudo apt-get install libusb-1.0 -
Baixe o código-fonte do openocd 0.9.0 em. http://openocd.org/
-
Extraia o OpenOCD e navegue até o diretório em que você o extraiu.
-
Configure o OpenOCD com o comando a seguir.
./configure --enable-ftdi --enable-jlink -
Execute o utilitário make para compilar o OpenOCD.
make install
Configuração do Eclipse
nota
Esta seção considera que você concluiu as etapas em Evitando o sudo
O Eclipse é o IDE preferido para desenvolvimento e depuração de aplicações. Ele fornece um IDE avançado e fácil de usar com suporte à depuração integrado, incluindo depuração com reconhecimento de threads. Esta seção descreve a configuração comum do Eclipse para todos os hosts de desenvolvimento que são compatíveis.
Como configurar o Eclipse
-
Baixe e instale o Java Run Time Environment (JRE).
O Eclipse exige a instalação do JRE. Recomendamos que você instale isso primeiro, embora ele possa ser instalado depois de instalar o Eclipse. A versão do JRE (32/64 bit) deve corresponder à versão do Eclipse (32/64 bit). Você pode baixar o JRE em 8 Downloads do Java SE Runtime Environment
no site da Oracle. -
Baixe e instale o “Eclipse IDE for C/C ++ Developers” em. http://www.eclipse.org
A versão do Eclipse 4.9.0 ou posterior é compatível. A instalação exige apenas que você extraia o arquivo baixado. Você executa o executável Eclipse específico da plataforma para iniciar a aplicação.
Compilação e execução do projeto de demonstração do FreeRTOS
Há duas maneiras de executar o projeto de demonstração do FreeRTOS:
-
Usar a linha de comando.
-
Abra o IDE do Eclipse.
Este tópico aborda as duas opções.
Provisionamento
-
Dependendo se você usa a aplicação de teste ou de demonstração, defina os dados de provisionamento em um dos seguintes arquivos:
-
./tests/common/include/aws_clientcredential.h -
./demos/common/include/aws_clientcredential.h
Por exemplo:
#define clientcredentialWIFI_SSID "Wi-Fi SSID" #define clientcredentialWIFI_PASSWORD "Wi-Fi password" #define clientcredentialWIFI_SECURITY "Wi-Fi security"nota
Você pode inserir os seguintes valores Wi-Fi de segurança:
eWiFiSecurityOpeneWiFiSecurityWEPeWiFiSecurityWPAeWiFiSecurityWPA2
O SSID e a senha devem ser colocados entre aspas duplas.
-
Compilação e execução da demonstração do FreeRTOS usando a linha de comando
-
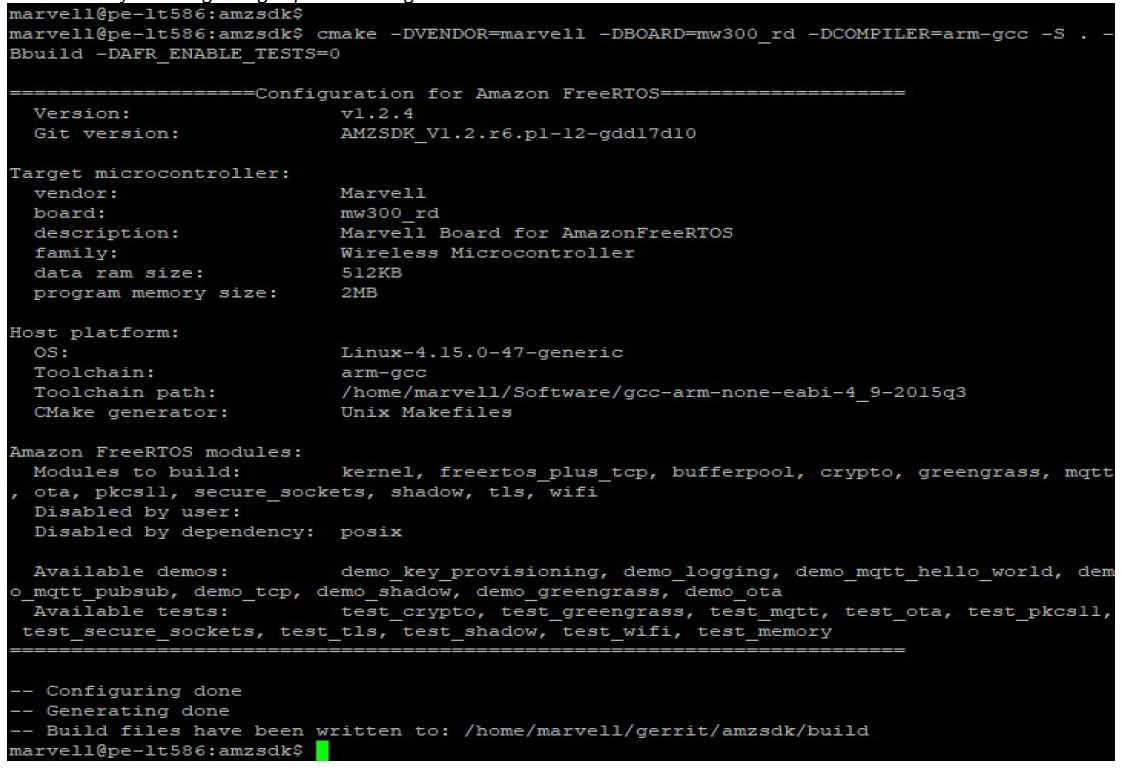
Use o comando a seguir para começar a compilar a aplicação de demonstração.
cmake -DVENDOR=marvell -DBOARD=mw320 -DCOMPILER=arm-gcc -S . -Bbuild -DAFR_ENABLE_TESTS=0Obtenha a mesma saída mostrada no exemplo a seguir.
-
Navegue até o diretório de compilação.
cd build -
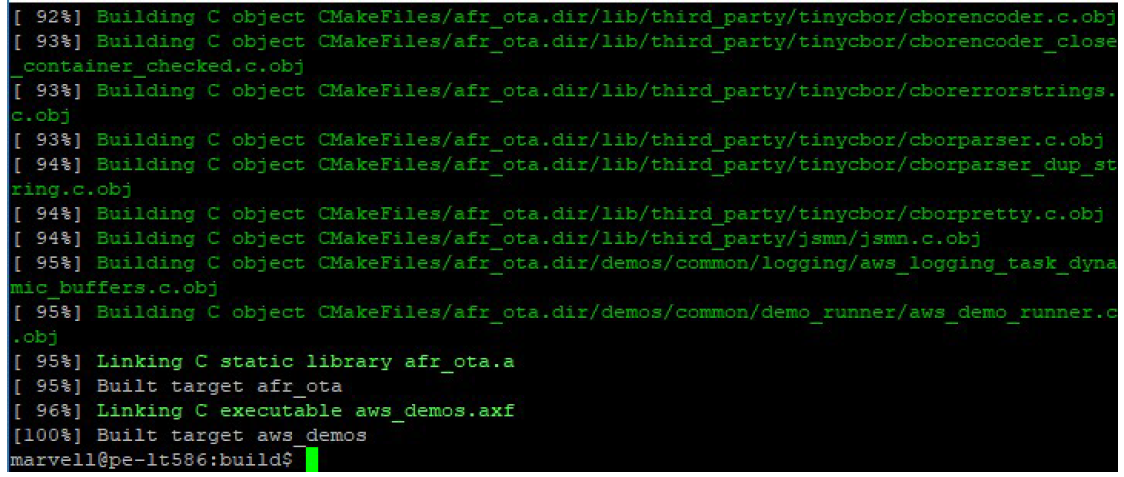
Execute o utilitário make para compilar a aplicação.
make all -j4Obtenha a mesma saída mostrada na figura a seguir:
-
Use os comandos a seguir para compilar uma aplicação de teste.
cmake -DVENDOR=marvell -DBOARD=mw320 -DCOMPILER=arm-gcc -S . -Bbuild -DAFR_ENABLE_TESTS=1 cd build make all -j4Execute o comando
cmaketoda vez que você alternar entre oaws_demos projecte oaws_tests project. -
Grave a imagem do firmware na instalação da placa de desenvolvimento. O firmware será executado após a redefinição da placa de desenvolvimento. Você deve criar o SDK antes de instalar a imagem para o microcontrolador.
-
Antes de instalar a imagem do firmware, prepare a instalação da placa de desenvolvimento com os componentes comuns Layout e Boot2. Use os seguintes comandos.
cd amzsdk_bundle-x.y.z ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/flashprog.py -l ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/mw300/layout.txt --boot2 ./vendors/marvell/WMSDK/mw320/boot2/bin/boot2.binO comando
flashproginicia o seguinte:-
Layout: o utilitário flashprog é instruído primeiro a gravar um layout na instalação. O layout é semelhante às informações de partição da instalação. O layout padrão está localizado em
/lib/third_party/mcu_vendor/marvell/WMSDK/mw320/sdk/tools/OpenOCD/mw300/layout.txt. -
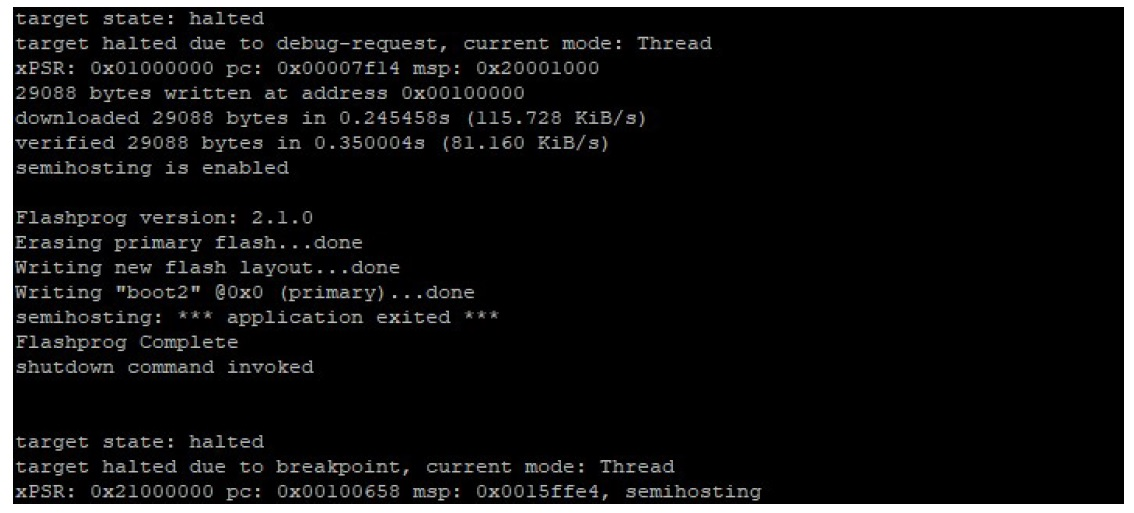
Boot2: este é o carregador de inicialização usado pelo WMSDK. O script
flashprogtambém grava um carregador de inicialização na instalação. O carregador de inicialização carrega a imagem do firmware do microcontrolador depois que ela é instalada na placa. Obtenha a mesma saída mostrada na figura abaixo.
-
-
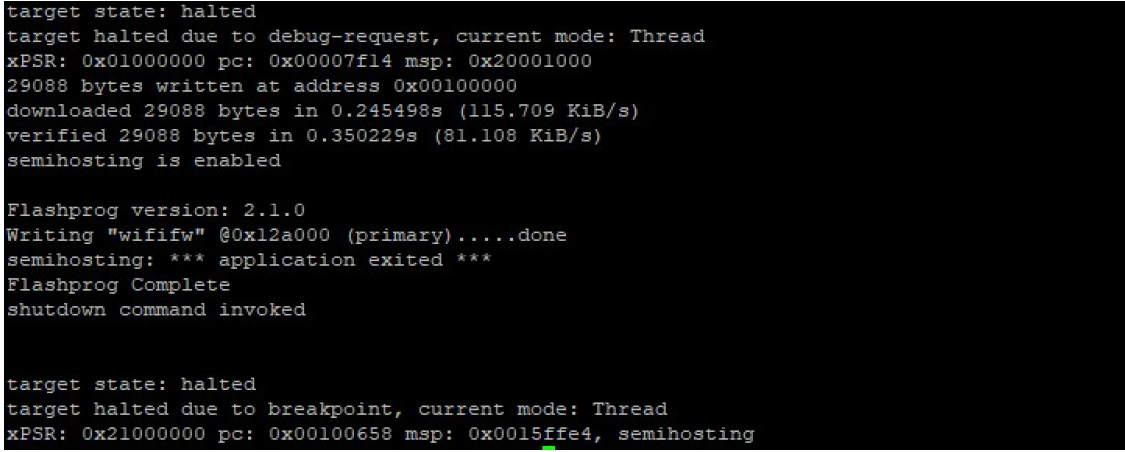
O firmware usa o Wi-Fi chipset para sua funcionalidade, e o Wi-Fi chipset tem seu próprio firmware que também deve estar presente no flash. Você usa o
flashprog.pyutilitário para atualizar o Wi-Fi firmware da mesma forma que fez para atualizar o boot-loader Boot2 e o firmware do MCU. Use os comandos a seguir para atualizar o Wi-Fi firmware.cd amzsdk_bundle-x.y.z ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/flashprog.py --wififw ./vendors/marvell/WMSDK/mw320/wifi-firmware/mw30x/mw30x_uapsta_W14.88.36.p135.binA saída do comando deve ser semelhante à figura abaixo.
-
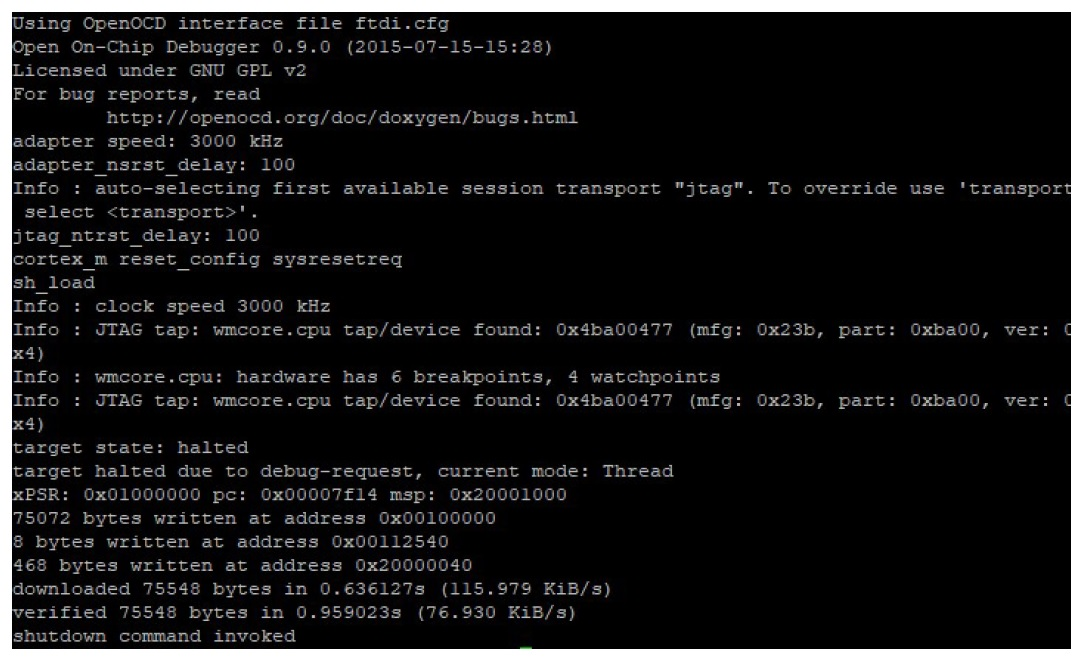
Use os comandos a seguir para instalar o firmware da MCU.
cd amzsdk_bundle-x.y.z ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/flashprog.py --mcufw build/cmake/vendors/marvell/mw300_rd/aws_demos.bin -r -
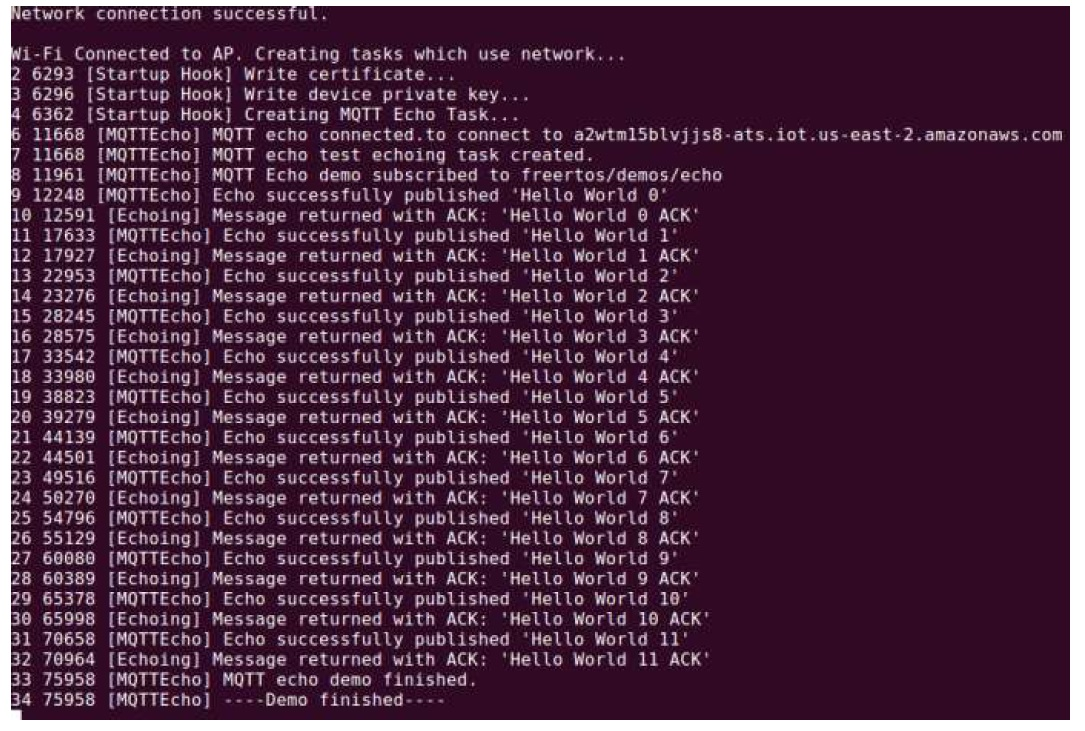
Redefina a placa. Você deve ver logs para a aplicação de demonstração.
-
Para executar a aplicação de teste, atualize o binário
aws_tests.binlocalizado no mesmo diretório.cd amzsdk_bundle-x.y.z ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/flashprog.py --mcufw build/cmake/vendors/marvell/mw300_rd/aws_tests.bin -rA saída de comando deve ser parecida com a mostrada na figura abaixo.
-
-
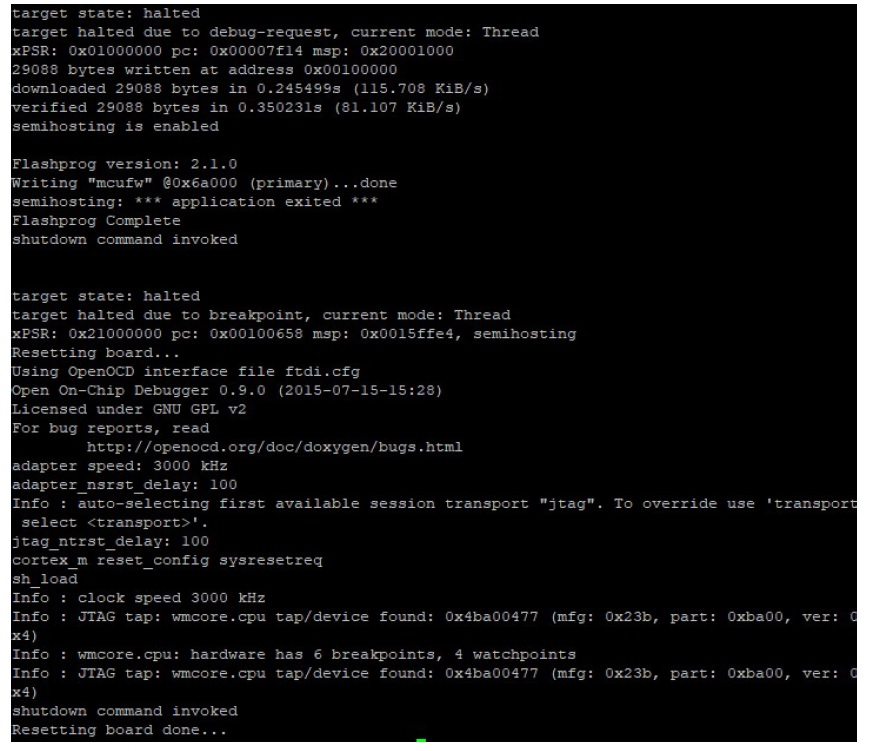
Depois de instalar o firmware e reiniciar a placa, a aplicação de demonstração deve iniciar conforme mostrado na figura abaixo.
-
(Opcional) Como método alternativo para testar a imagem, use o utilitário flashprog para copiar a imagem do microcontrolador do host diretamente na RAM do microcontrolador. A imagem não é copiada na instalação, então ela será perdida após a reinicialização do microcontrolador.
Carregar a imagem do firmware na SRAM é uma operação mais rápida porque inicia o arquivo de execução imediatamente. Esse método é usado principalmente para desenvolvimento iterativo.
Use os comandos a seguir para carregar o firmware na SRAM.
cd amzsdk_bundle-x.y.z ./lib/third_party/mcu_vendor/marvell/WMSDK/mw320/sdk/tools/OpenOCD/ramload.py build/cmake/vendors/marvell/mw300_rd/aws_demos.axfA saída do comando é mostrada na figura abaixo.
Quando a execução do comando for concluída, você deverá ver os logs da aplicação de demonstração.
Compilação e execução da demonstração do FreeRTOS usando o IDE do Eclipse
-
Antes de configurar um espaço de trabalho do Eclipse, você deve executar o comando
cmake.Execute o comando a seguir para trabalhar com o projeto Eclipse do
aws_demos.cmake -DVENDOR=marvell -DBOARD=mw320 -DCOMPILER=arm-gcc -S . -Bbuild -DAFR_ENABLE_TESTS=0Execute o comando a seguir para trabalhar com o projeto Eclipse do
aws_tests.cmake -DVENDOR=marvell -DBOARD=mw320 -DCOMPILER=arm-gcc -S . -Bbuild -DAFR_ENABLE_TESTS=1dica
Execute o comando
cmaketoda vez que você alternar entre o projetoaws_demose oaws_tests. -
Abra o Eclipse e, quando solicitado, escolha a área de trabalho do Eclipse, conforme mostrado na figura abaixo.
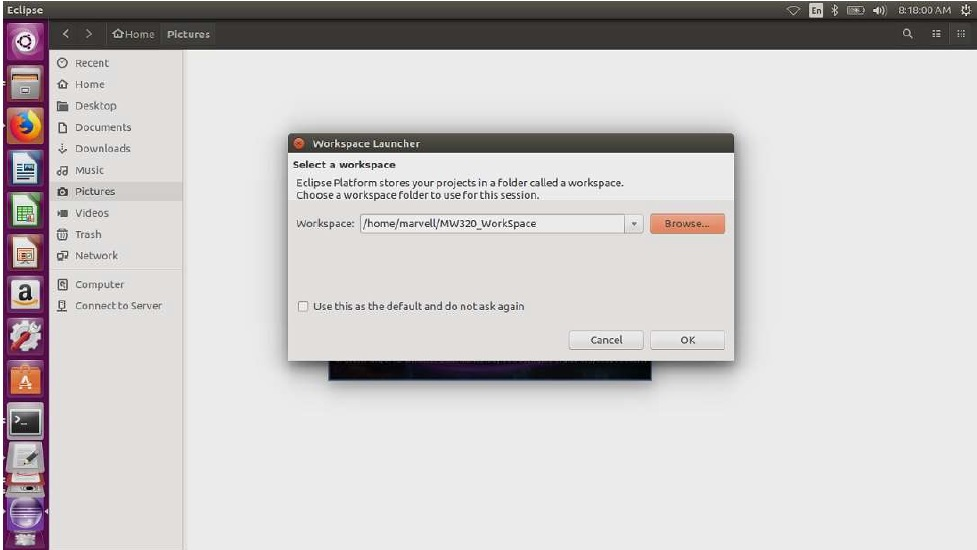
-
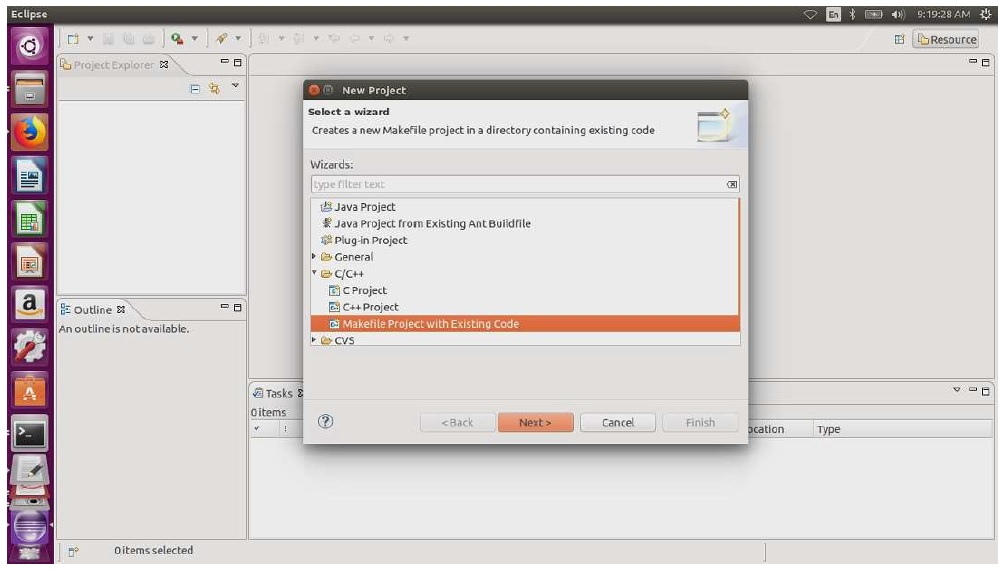
Escolha a opção de criar um projeto Makefile: com código existente, conforme mostrado na figura abaixo.
-
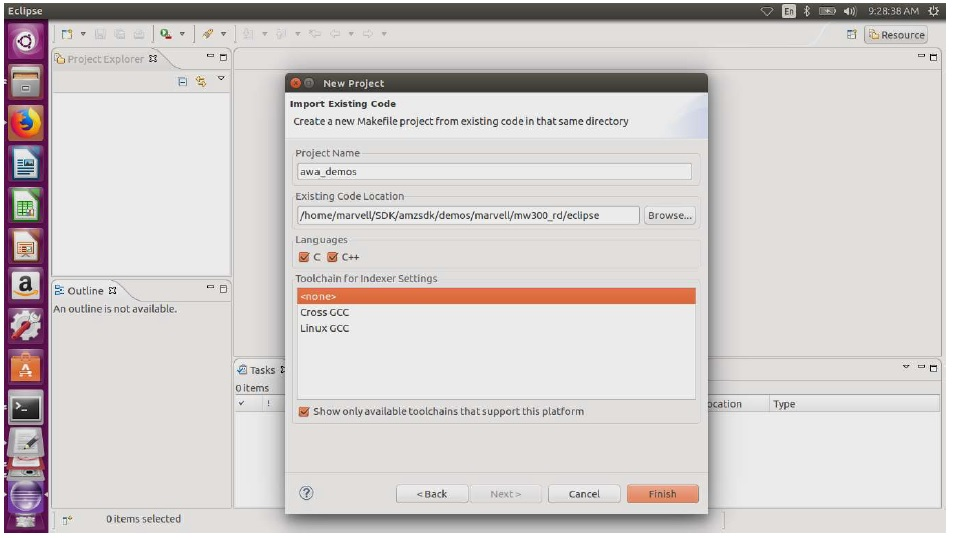
Escolha Procurar, especifique o diretório do código existente e escolha Concluir.
-
No painel de navegação, escolha aws_demos no explorador de projetos. Right-click aws_demos para abrir o menu e, em seguida, escolha Construir.
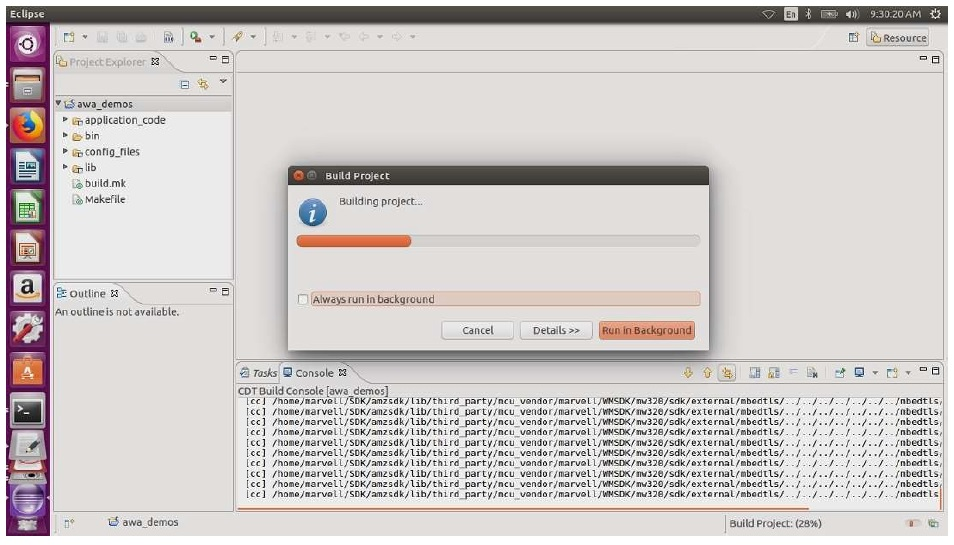
Se houver êxito na compilação, ela gerará o arquivo
build/cmake/vendors/marvell/mw300_rd/aws_demos.bin. -
Use as ferramentas da linha de comando para atualizar o arquivo de layout (
layout.txt), o binário Boot2 (boot2.bin), o binário do firmware MCU (aws_demos.bin) e o Wi-Fi firmware.-
Antes de instalar a imagem do firmware, prepare a instalação da placa de desenvolvimento com os componentes comuns, Layout e Boot2. Use os seguintes comandos.
cd amzsdk_bundle-x.y.z ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/flashprog.py -l ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/mw300/layout.txt --boot2 ./vendors/marvell/WMSDK/mw320/boot2/bin/boot2.binO comando
flashproginicia o seguinte:-
Layout: o utilitário flashprog é instruído primeiro a gravar um layout na instalação. O layout é semelhante às informações de partição da instalação. O layout padrão está localizado em
/lib/third_party/mcu_vendor/marvell/WMSDK/mw320/sdk/tools/OpenOCD/mw300/layout.txt. -
Boot2: este é o carregador de inicialização usado pelo WMSDK. O flashprog também grava um carregador de inicialização na instalação. O carregador de inicialização carrega a imagem do firmware do microcontrolador depois que ela é instalada na placa. Obtenha a mesma saída mostrada na figura abaixo.
-
-
O firmware usa o Wi-Fi chipset para sua funcionalidade, e o Wi-Fi chipset tem seu próprio firmware que também deve estar presente no flash. Você usa o
flashprog.pyutilitário para atualizar o Wi-Fi firmware da mesma forma que fez para atualizar o boot-loader boot2 e o firmware da MCU. Use os comandos a seguir para atualizar o Wi-Fi firmware.cd amzsdk_bundle-x.y.z ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/flashprog.py --wififw ./vendors/marvell/WMSDK/mw320/wifi-firmware/mw30x/mw30x_uapsta_W14.88.36.p135.binA saída do comando deve ser semelhante à figura abaixo.
-
Use os comandos a seguir para instalar o firmware da MCU.
cd amzsdk_bundle-x.y.z ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/flashprog.py --mcufw build/cmake/vendors/marvell/mw300_rd/aws_demos.bin -r -
Redefina a placa. Você deve ver logs para a aplicação de demonstração.
-
Para executar a aplicação de teste, atualize o binário
aws_tests.binlocalizado no mesmo diretório.cd amzsdk_bundle-x.y.z ./vendors/marvell/WMSDK/mw320/sdk/tools/OpenOCD/flashprog.py --mcufw build/cmake/vendors/marvell/mw300_rd/aws_tests.bin -rA saída de comando deve ser parecida com a mostrada na figura abaixo.
-
Depuração
-
Inicie o Eclipse e escolha Ajuda, em seguida, escolha Instalar novo software. No menu Trabalhar com, escolha Todos os sites disponíveis. Insira o texto do filtro
GDB Hardware. Selecione a opção C/C++ GDB Hardware Debugging e instale o plug-in.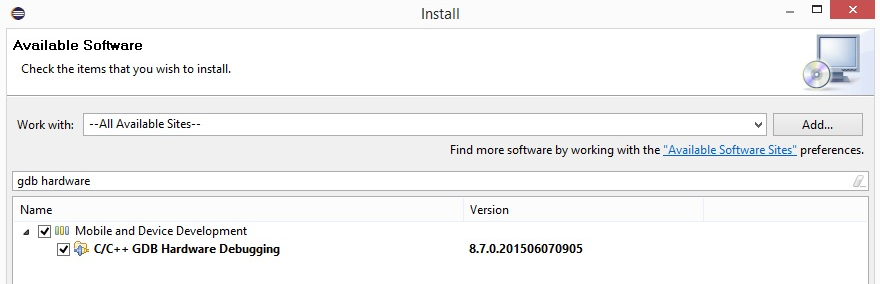
Solução de problemas
- Problemas de rede
-
Verifique suas credenciais de rede. Consulte "Provisionamento" em Compilação e execução do projeto de demonstração do FreeRTOS.
- Habilitação de logs adicionais
-
-
Habilitar logs específicos da placa.
Habilite chamadas para
wmstdio_init(UART0_ID, 0)na funçãoprvMiscInitializationno arquivomain.cem testes ou demonstrações. -
Habilitando Wi-Fi registros
Ative a macro
CONFIG_WLCMGR_DEBUGno arquivofreertos/vendors/marvell/WMSDK/mw320/sdk/src/incl/autoconf.h
-
- Uso do GDB
-
Recomendamos que você use os arquivos de comando
arm-none-eabi-gdbegdbempacotados junto com o SDK. Navegue até o diretório .cdfreertos/lib/third_party/mcu_vendor/marvell/WMSDK/mw320Execute o comando a seguir (em uma única linha) para se conectar ao GDB.
arm-none-eabi-gdb -x ./sdk/tools/OpenOCD/gdbinit ../../../../../../build/cmake/vendors/marvell/mw300 _rd/aws_demos.axf
