기계 번역으로 제공되는 번역입니다. 제공된 번역과 원본 영어의 내용이 상충하는 경우에는 영어 버전이 우선합니다.
AWS DeepRacer 차량을 운전해 보세요.
AWS DeepRacer 차량 설정 후에는 차량을 수동으로 주행하기 시작하거나 차량의 디바이스 콘솔을 사용하여 자율적으로 주행하도록 둘 수 있습니다.
자율 주행을 하려면 AWS DeepRacer 모델을 훈련하고, 훈련된 모델 아티팩트를 차량에 배포해야 합니다. 자율 레이싱 모드에서 추론 엔진에서 실행 중인 모델은 차량의 주행 방향과 속도를 제어합니다. 훈련된 모델을 차량으로 다운로드하지 않은 상태에서는 차량의 디바이스 콘솔을 사용하여 차량을 수동으로 운전할 수 있습니다.
자율 주행 시 차량의 성능에 영향을 미치는 요인들이 많습니다. 훈련된 모델과 차량 보정을 비롯해 표면 마찰, 색상 대비, 조명 반사 같은 트랙 조건도 여기에 포함됩니다. 차량이 최적의 성능을 발휘하려면 시뮬레이션에서 실제 환경으로 이어지는 모델 전환이 정확하고, 적합하고, 유의적이어야 합니다. 자세한 내용은 실제 환경에 대한 AWS DeepRacer 모델 훈련 최적화 섹션을 참조하세요.
AWS DeepRacer 차량 수동 주행
훈련된 모델이 없거나, 혹은 훈련된 모델을 AWS DeepRacer 차량에 배포하지 않았다면 자율 주행이 어렵습니다. 하지만 수동으로 운전할 수는 있습니다.
AWS DeepRacer 차량을 수동으로 주행하려면 아래 단계를 따릅니다.
AWS DeepRacer 차량을 수동으로 주행하는 방법
-
AWS DeepRacer 차량이 Wi-Fi 네트워크에 연결된 상태에서 지침에 따라 차량의 디바이스 제어 콘솔에 로그인합니다.
-
차량 제어 페이지의 제어에서 수동 운전을 선택합니다.

-
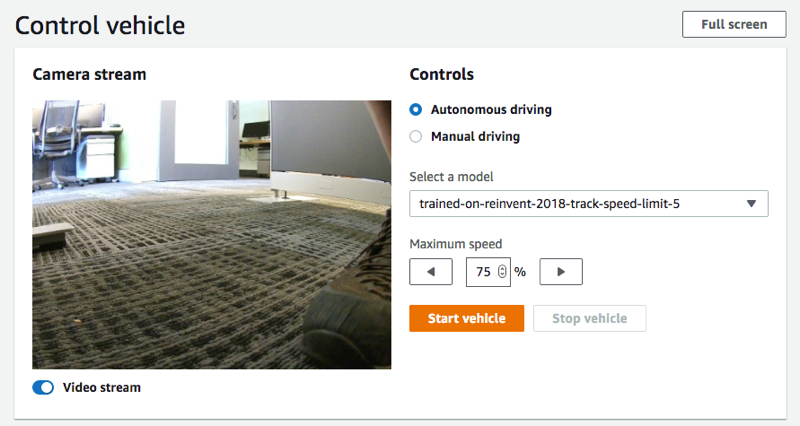
Click or touch to drive(클릭 또는 터치하여 주행 시작) 아래에서 주행 패드 내 위치를 클릭하거나 터치하여 차량을 주행합니다. 차량의 전방 카메라에서 수집한 이미지가 Camera stream(카메라 스트림) 아래 비디오 플레이어에 표시됩니다.
-
차량을 운전하는 동안 디바이스 콘솔에서 비디오 스트림을 켜거나 끄려면 Camera stream(카메라 스트림) 화면에서 Video stream(비디오 스트림) 옵션을 전환합니다.
-
3단계부터 반복하여 차량을 다른 위치로 주행합니다.
AWS DeepRacer 차량 자율 주행
자율 주행을 시작하려면 차량을 물리적 트랙 위에 놓고 다음과 같이 따릅니다.
AWS DeepRacer 차량을 자율 주행하는 방법
-
지침에 따라 차량의 디바이스 콘솔에 로그인한 후 다음과 같은 방법으로 자율 주행을 시작합니다.
-
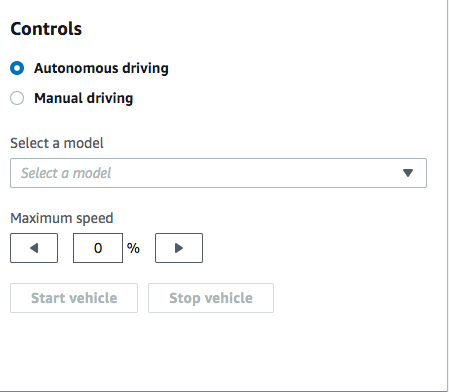
차량 제어 페이지의 제어에서 자율 주행을 선택합니다.
-
Select a model(모델 선택) 드롭다운 목록에서 업로드된 모델을 선택합니다. Load model(모델 로드)를 선택합니다. 그러면 모델이 추론 엔진에 로드되기 시작합니다. 로딩 프로세스는 약 10초 걸립니다.
-
차량의 Maximum speed(최대 속도) 설정을 모델 훈련 시 사용한 최대 속도의 비율로 조정합니다.
이때 차량의 최대 속도는 실제 트랙의 표면 마찰 등 몇 가지 요인으로 인해 훈련 시 사용한 최대 속도보다 느릴 수 있습니다. 최적의 설정을 찾으려면 실험이 필요합니다.
-
Start vehicle(차량 출발)을 선택하여 차량을 자율 주행합니다.
-
차량을 운전하는 동안 디바이스 콘솔에서 비디오 스트림을 켜거나 끄려면 Camera stream(카메라 스트림) 화면에서 Video stream(비디오 스트림) 옵션을 전환합니다.
-
물리적 트랙에서 또는 디바이스 콘솔의 스트리밍 비디오 플레이어에서 차량이 주행하는 모습을 살펴봅니다.
-
차량을 멈추려면 Stop vehicle(차량 정지)을 선택합니다.
동일한 모델이나 다른 모델로 3단계부터 주행을 반복합니다.
